

하모닉 감속기 원리
20 세기 5 0 1900년대 미국 천재 발명가 C. 월트 머서(Walt Musser)는 유연한 얇은 벽 부품의 변동을 통해 동력 부하를 전달하는 하모닉 드라이브를 발명했습니다.
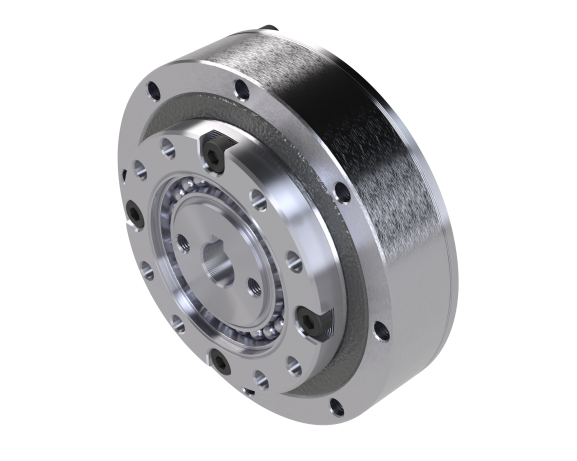
하모닉 감속기의 가장 기본적인 구성 요소는 강성 휠, 유연 휠, 웨이브 제너레이터의 세 부분으로 구성됩니다.
1、 강성 휠: 강성 내부 기어 링으로, 일반적으로 유연 휠보다 이가 두 개 더 많습니다. 보통 하우징에 고정됩니다.
2、 유연 휠: 개구부 외주에 기어가 있는 얇은 벽의 금속 탄성 부품으로, 웨이브 제너레이터의 회전에 따라 주기적으로 변형됩니다. 보통 출력 축에 연결됩니다.
3、 웨이브 제너레이터: 타원형 캠과 유연 베어링으로 구성되며, 보통 입력 축에 연결됩니다. 유연 베어링의 내부 링은 캠에 고정되고, 외부 링은 롤링 볼을 통해 탄성 변형되어 타원형이 됩니다.
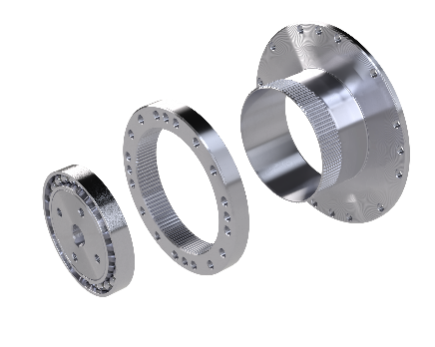
웨이브 제너레이터 강성 휠 유연 휠
하모닉 감속기의 특징:
1、 높은 하중 용량 동일한 감속비와 기어박스 크기에서, 하모닉의 이빨 맞물림이 표면 접촉이며 동시에 맞물리는 이빨 수가 상대적으로 많기 때문에 전통적인 감속기보다 하중 용량이 더 높습니다.
2、 큰 전송비 단일 단계 전송비는 i=50~입니다. 300.
3、 경량 토크 전달의 핵심 부품이 얇은 벽 부품인 유연 휠이기 때문에 무게가 상대적으로 가볍습니다.
4、 안정적인 전송 낮은 충격, 소음 및 높은 전송 정확도. 하모닉 감속기의 다중 이빨 맞물림 특성으로 인해 작동이 안정적이고 전송 정확도가 높습니다(일반적으로 전송 오차는 1 아크분 미만).
높은 토크, 긴 수명
이론적 설계 분석과 실험 검증을 통해 여러 차례 최적화 반복을 거쳤으며, 성능은 유명 해외 브랜드의 최신 고토크 제품과 직접 비교됩니다.
낮은 진동, 높은 정밀도
하모닉 전송 메커니즘에 대한 심층 연구를 통해 진동 전달에서 시작하여 하모닉 감속기의 진동 문제를 자극원과 전송 과정에서 해결했습니다.
높은 효율, 낮은 백래시
이빨 맞물림 자국을 최적화하고 다중 맞물림 지점을 가진 등부피 이빨 프로파일을 만들어 이빨 표면 마찰을 줄였습니다.
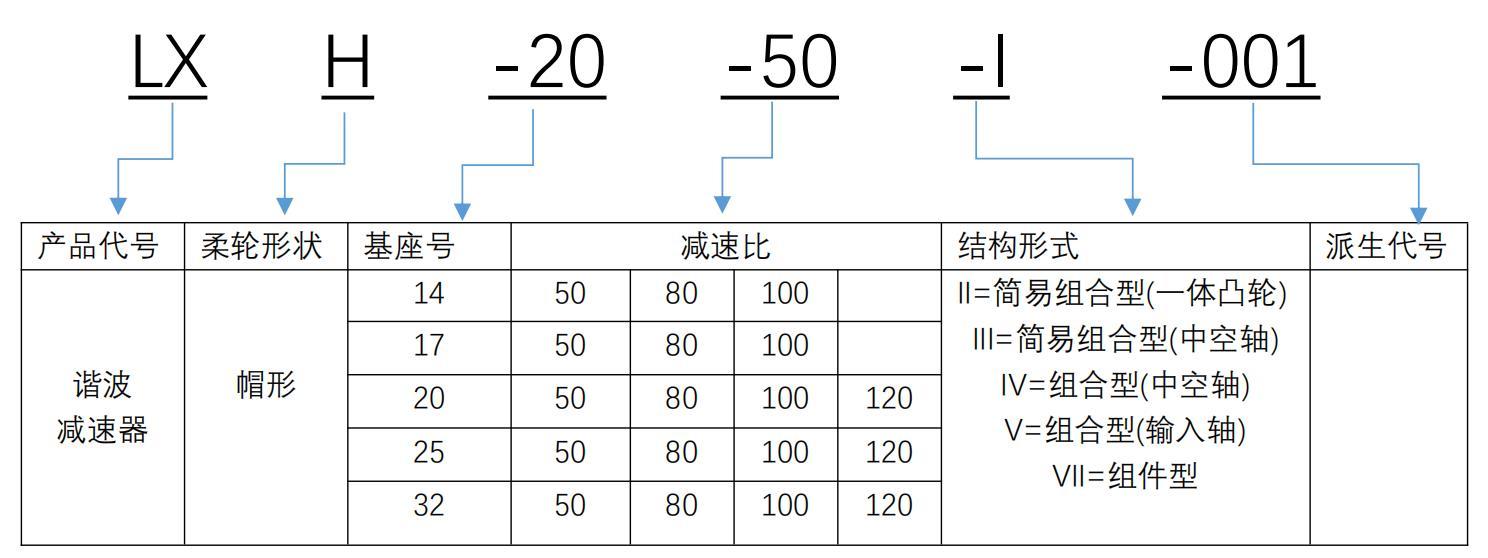
LXC 시리즈 명명 규칙 및 성능
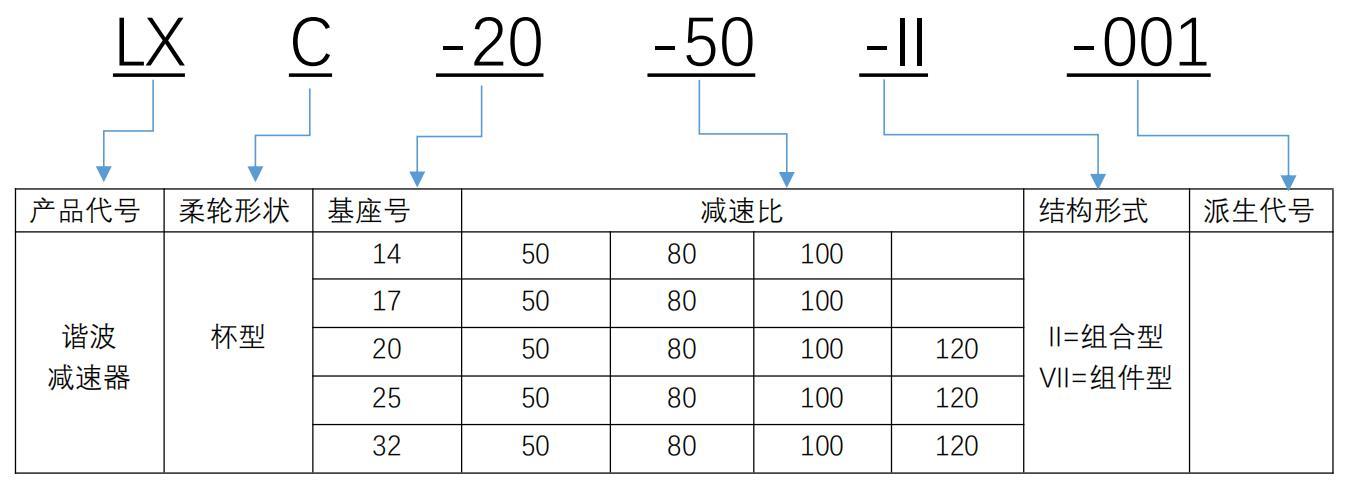
LX —— 리안이 하모닉 감속기를 나타냅니다.
C —— 유연 휠이 찻잔 모양임을 나타냅니다.
'-2' 0 —— 감속기 기어의 피치 원 직경이 5임을 나타냅니다. 0 (2 0*2.54) mm.
'-5' 0 —— 감속기의 감속비가 1:5임을 나타냅니다. 0 (웨이브 제너레이터가 입력되고 강성 휠이 고정되며 유연 휠이 출력될 때의 감속비).
-II —— 감속기의 구조 형식을 나타냅니다. 자세한 매개변수는 모델 세부 정보를 참조하십시오.
'-0' 01 —— 감속기의 파생 코드로, 일부 구조가 표준 모델에서 수정된 것을 나타냅니다.
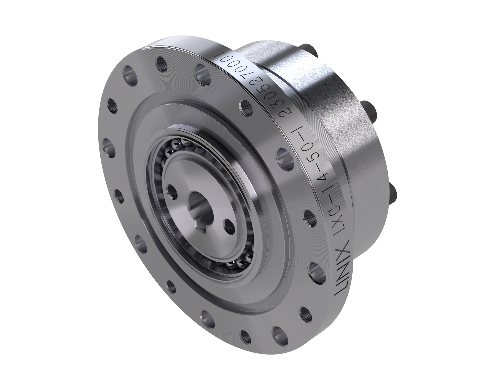
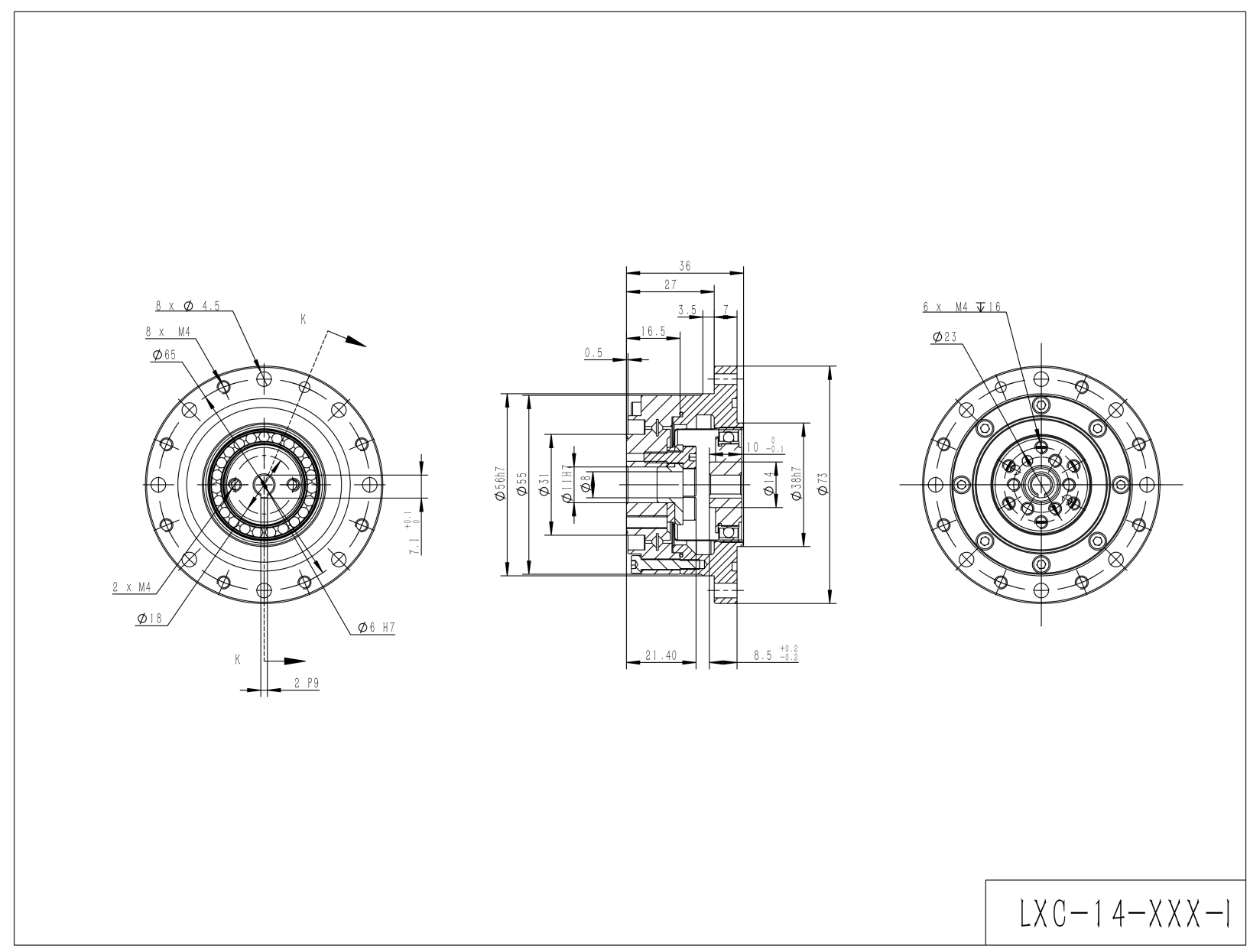
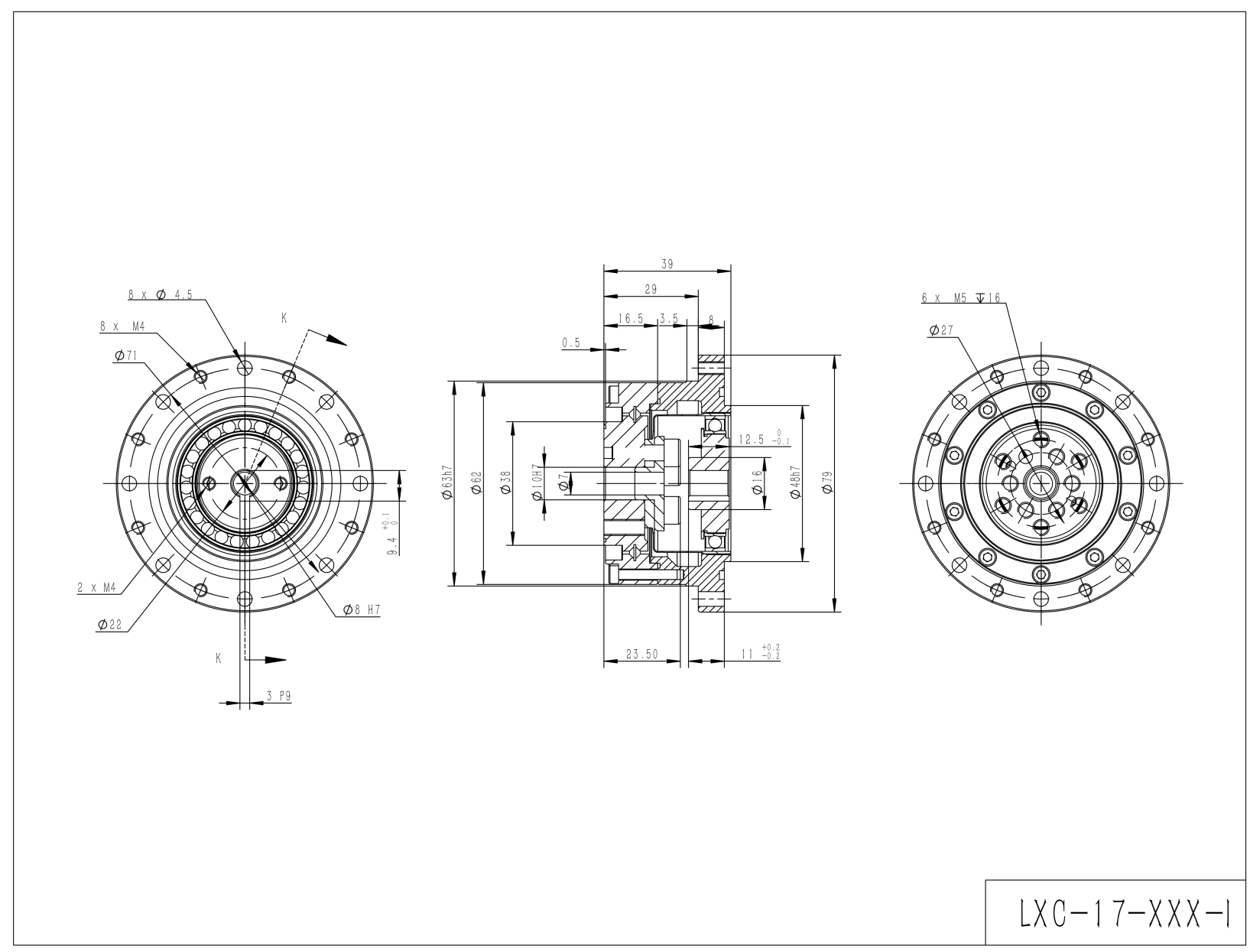
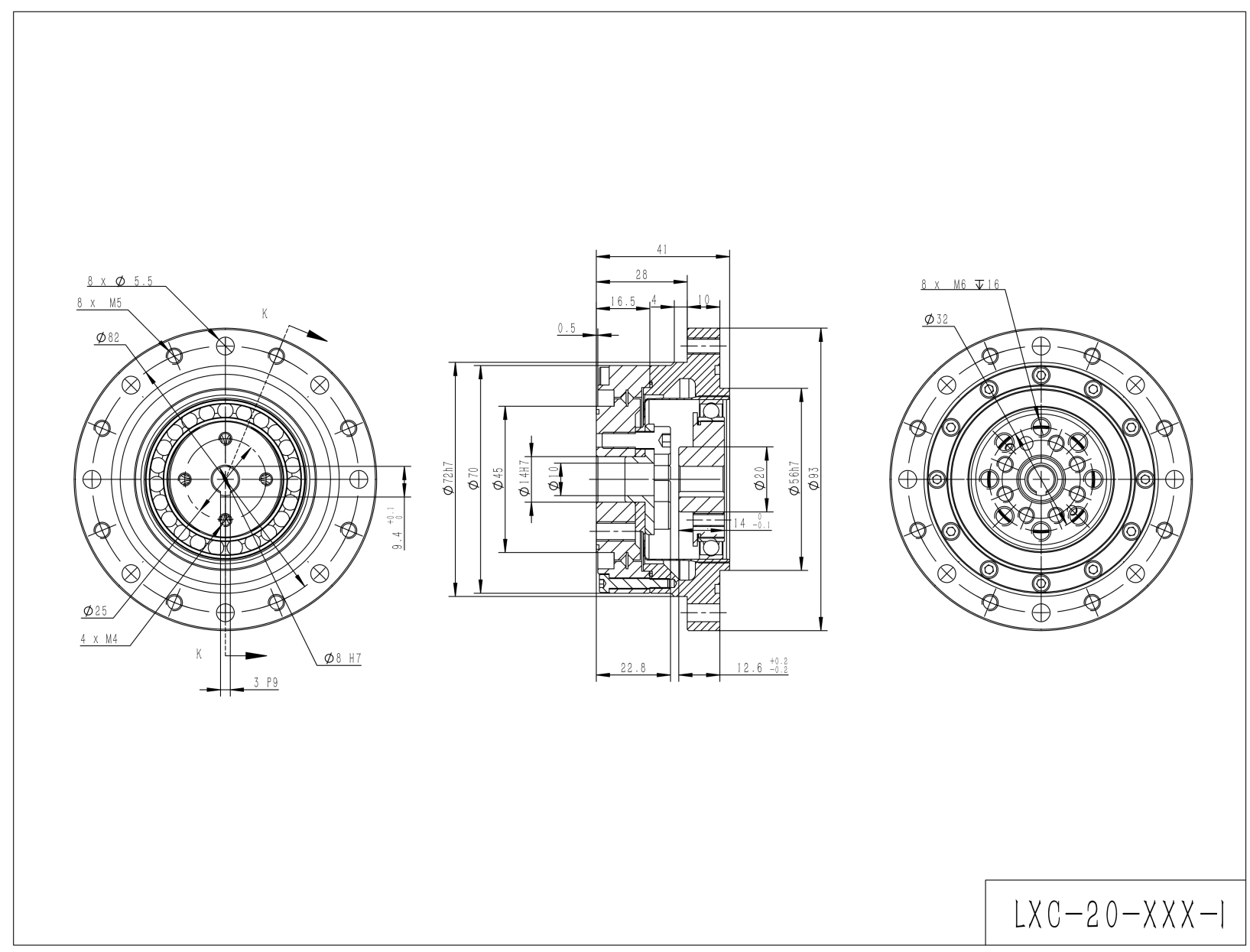
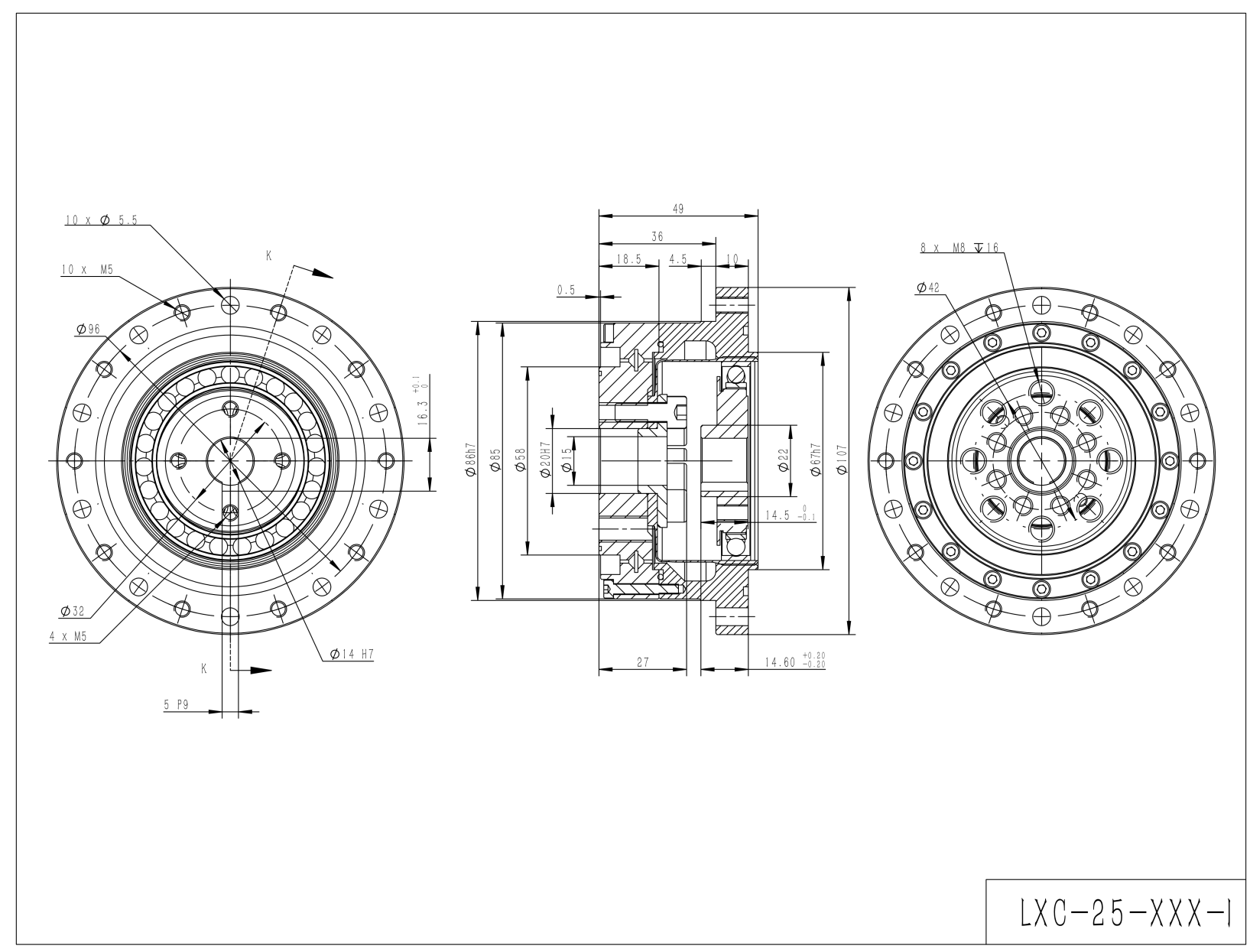
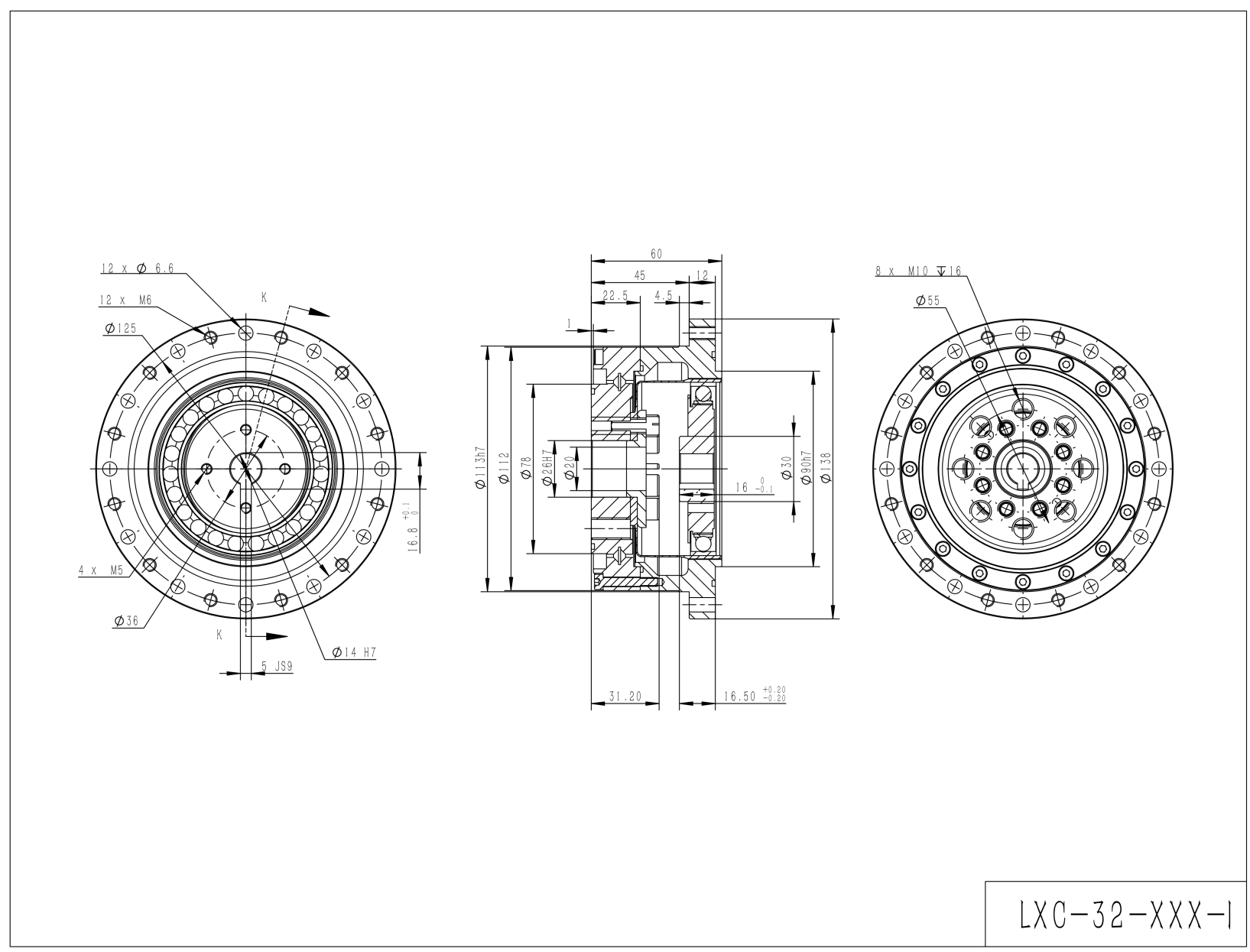
LXC-II 모델
LXC-II 시리즈 감속기는 웨이브 제너레이터와 감속기 본체가 분리된 단순 결합 감속기입니다. 고객은 웨이브 제너레이터를 축 방향 및 반경 방향으로 설계 및 고정하고 전체 캐비티에 윤활 그리스를 추가해야 합니다. 설치 요구 사항이 높지만 전체 구조를 더 컴팩트하게 만들 수 있습니다. 웨이브 제너레이터는 모터 축에 직접 설치할 수 있으며, 일반적으로 엔드 전송 메커니즘에 사용됩니다.
|
LXC- XX - XXX -II 시리즈 성능 매개변수 표 |
|||||||||
|
모델 |
감속비 |
정격 토크 '*1' (Nm) |
시작 및 정지 시 최대 허용 토크 (Nm) |
최대 허용 평균 부하 토크 '*2' (Nm) |
순간 최대 허용 토크 '*3' (Nm) |
최대 허용 입력 속도 |
허용 평균 입력 속도 |
백래시 |
전송 오차 |
|
≤ |
≤ |
||||||||
|
14 |
50 |
7 |
23 |
9 |
46 |
8000 |
3500 |
10 |
60 |
|
80 |
10 |
30 |
14 |
51 |
10 |
60 |
|||
|
100 |
10 |
36 |
14 |
70 |
10 |
60 |
|||
|
17 |
50 |
21 |
44 |
34 |
91 |
7000 |
3500 |
10 |
60 |
|
80 |
29 |
56 |
35 |
113 |
10 |
60 |
|||
|
100 |
31 |
70 |
51 |
143 |
10 |
60 |
|||
|
20 |
50 |
33 |
73 |
44 |
127 |
6000 |
3500 |
10 |
60 |
|
80 |
44 |
96 |
61 |
165 |
10 |
60 |
|||
|
100 |
52 |
107 |
64 |
191 |
10 |
60 |
|||
|
120 |
52 |
113 |
64 |
191 |
10 |
60 |
|||
|
25 |
50 |
51 |
127 |
72 |
242 |
5500 |
3500 |
10 |
60 |
|
80 |
82 |
178 |
113 |
332 |
10 |
60 |
|||
|
100 |
87 |
204 |
140 |
369 |
10 |
60 |
|||
|
120 |
87 |
217 |
140 |
395 |
10 |
60 |
|||
|
32 |
50 |
99 |
281 |
140 |
497 |
4500 |
3500 |
10 |
60 |
|
80 |
153 |
395 |
217 |
738 |
10 |
60 |
|||
|
100 |
178 |
433 |
281 |
841 |
10 |
60 |
|||
|
120 |
178 |
459 |
281 |
892 |
10 |
60 |
|||
|
'*1 정격 속도가 2000 rpm일 때의 정격 토크 크기. |
|||||||||
LXH 시리즈 명명 규칙 및 성능
LX —— 리안이 하모닉 감속기를 나타냅니다.
H —— 유연 휠이 탑 햇 모양임을 나타냅니다.
'-2' 0 —— 감속기 기어의 피치 원 직경이 5임을 나타냅니다. 0 (2 0*2.54) mm.
'-5' 0 —— 감속기의 감속비가 1:5임을 나타냅니다. 0 (웨이브 제너레이터가 입력되고 강성 휠이 고정되며 유연 휠이 출력될 때의 감속비).
-I —— 감속기의 구조 형식을 나타냅니다. 자세한 매개변수는 모델 세부 정보를 참조하십시오.
'-0' 01 —— 감속기의 파생 코드로, 일부 구조가 표준 모델에서 수정된 것을 나타냅니다.
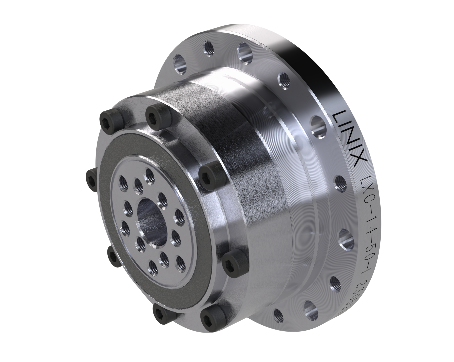
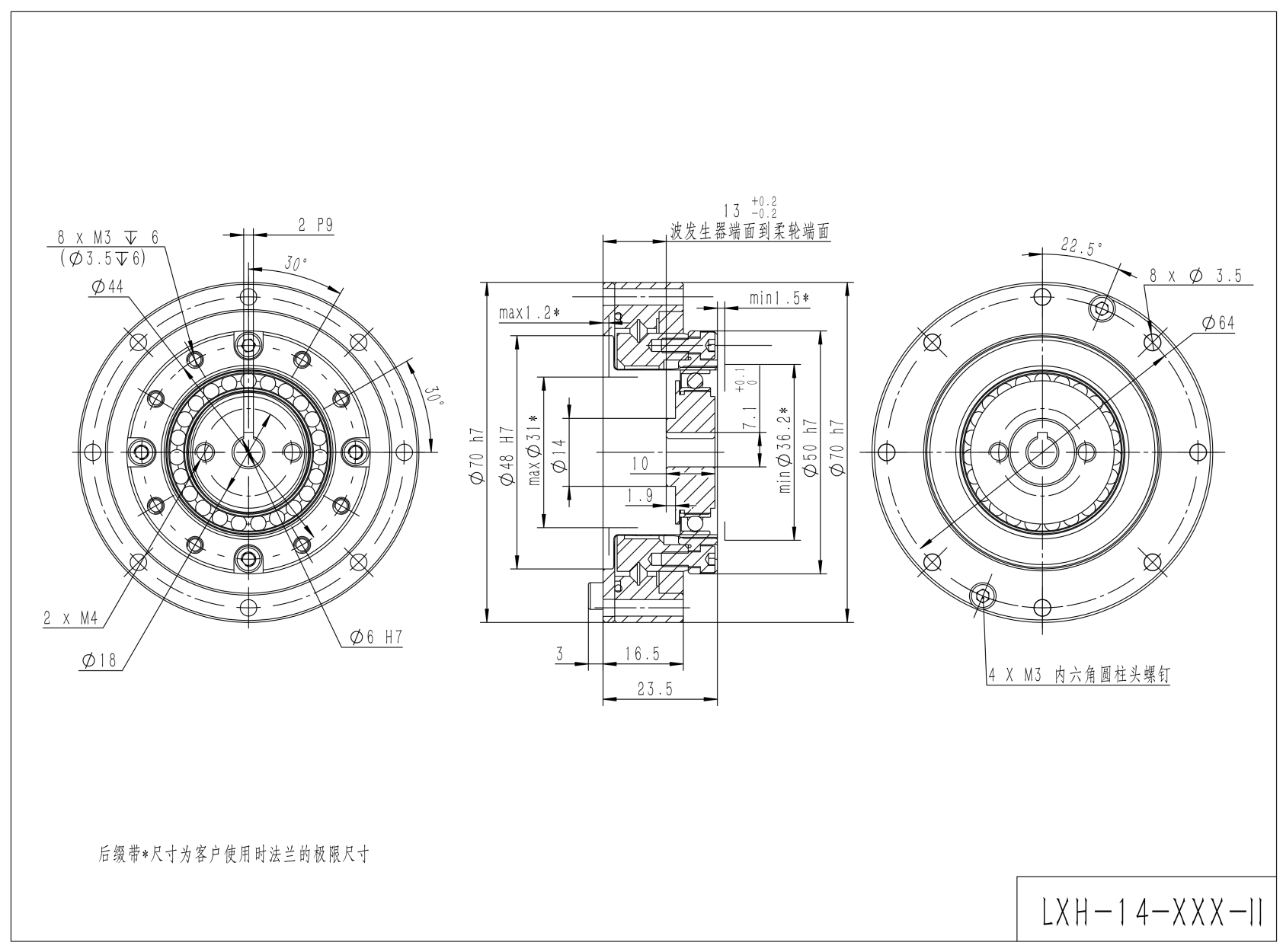
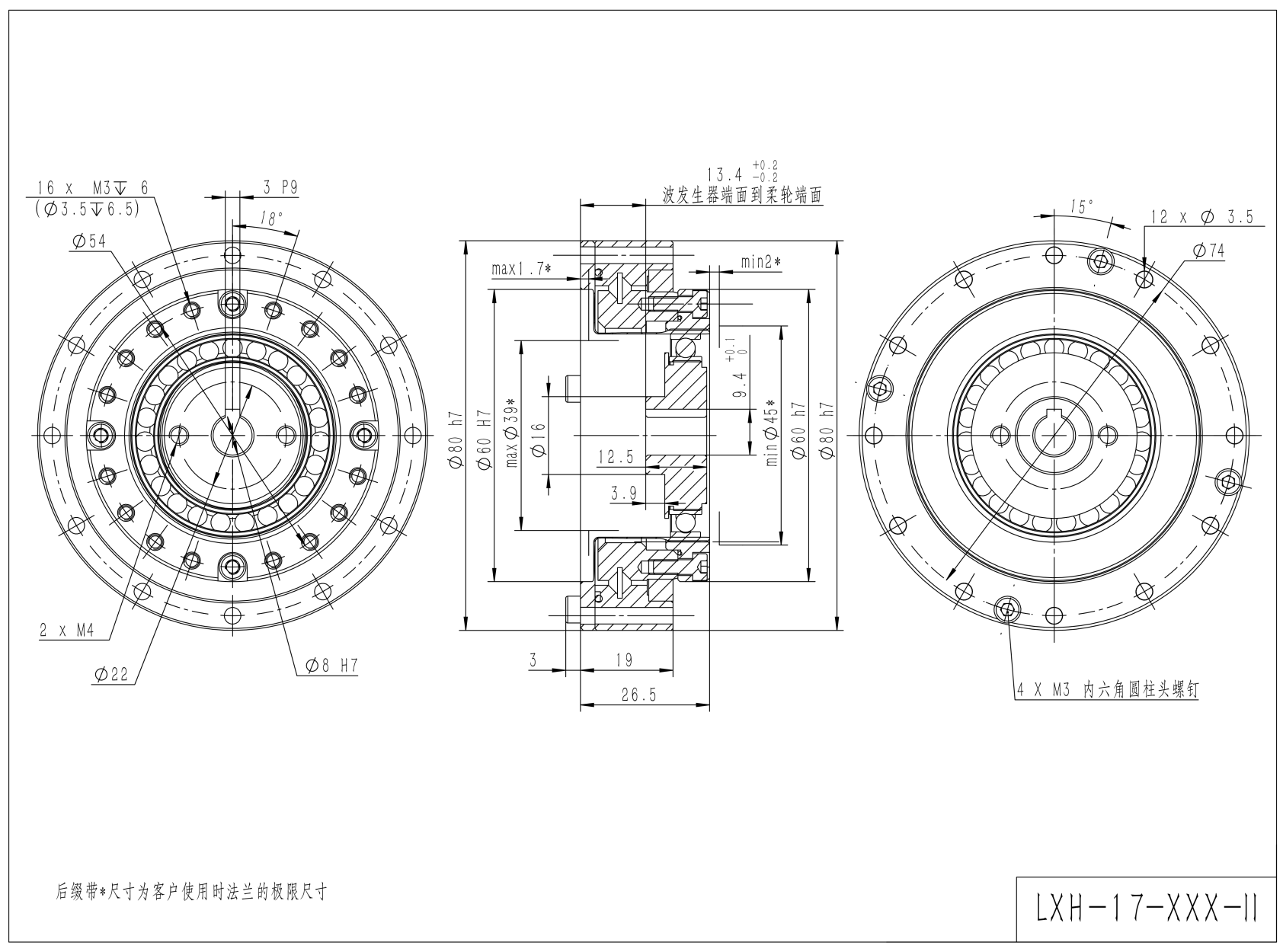
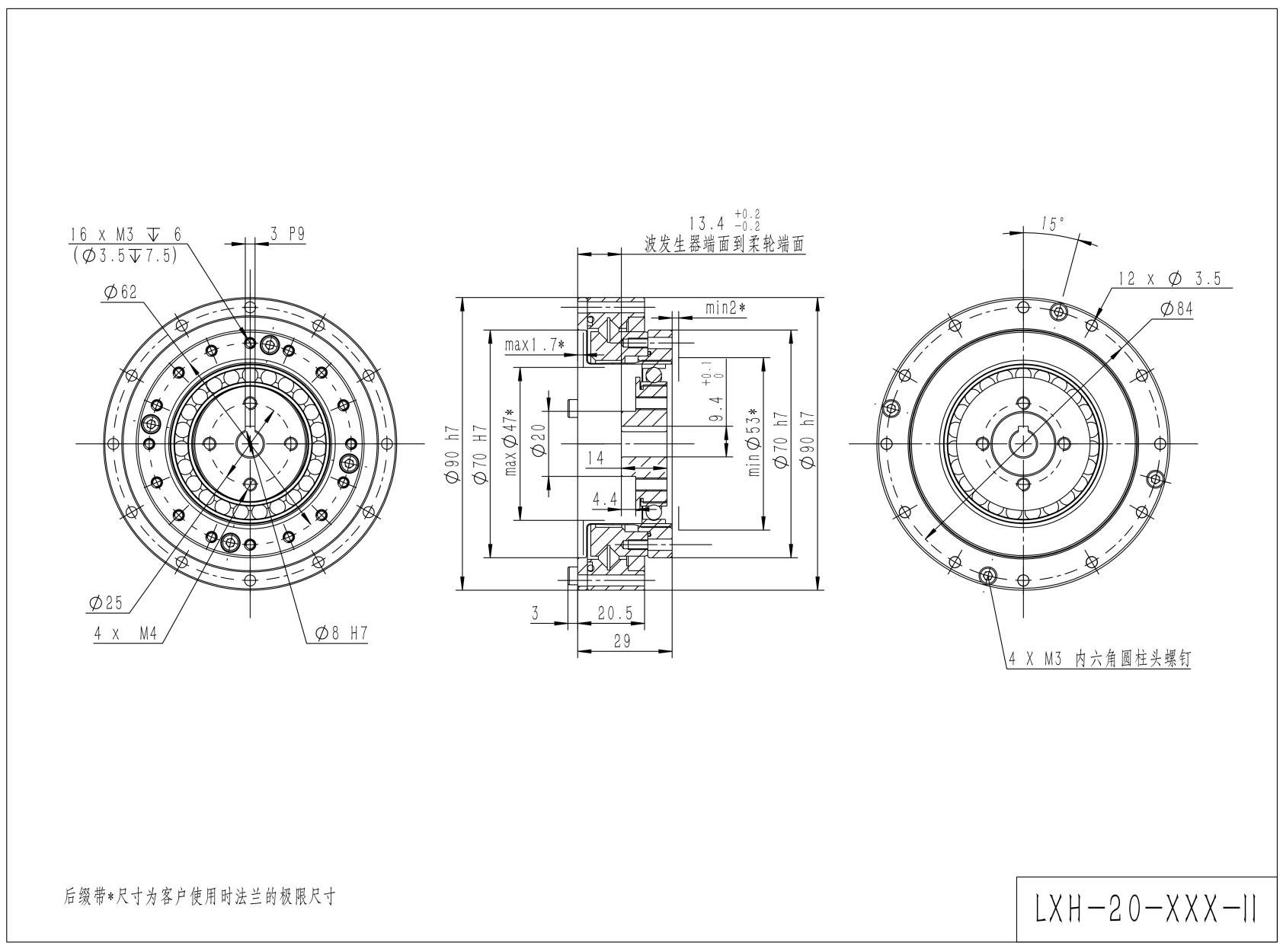
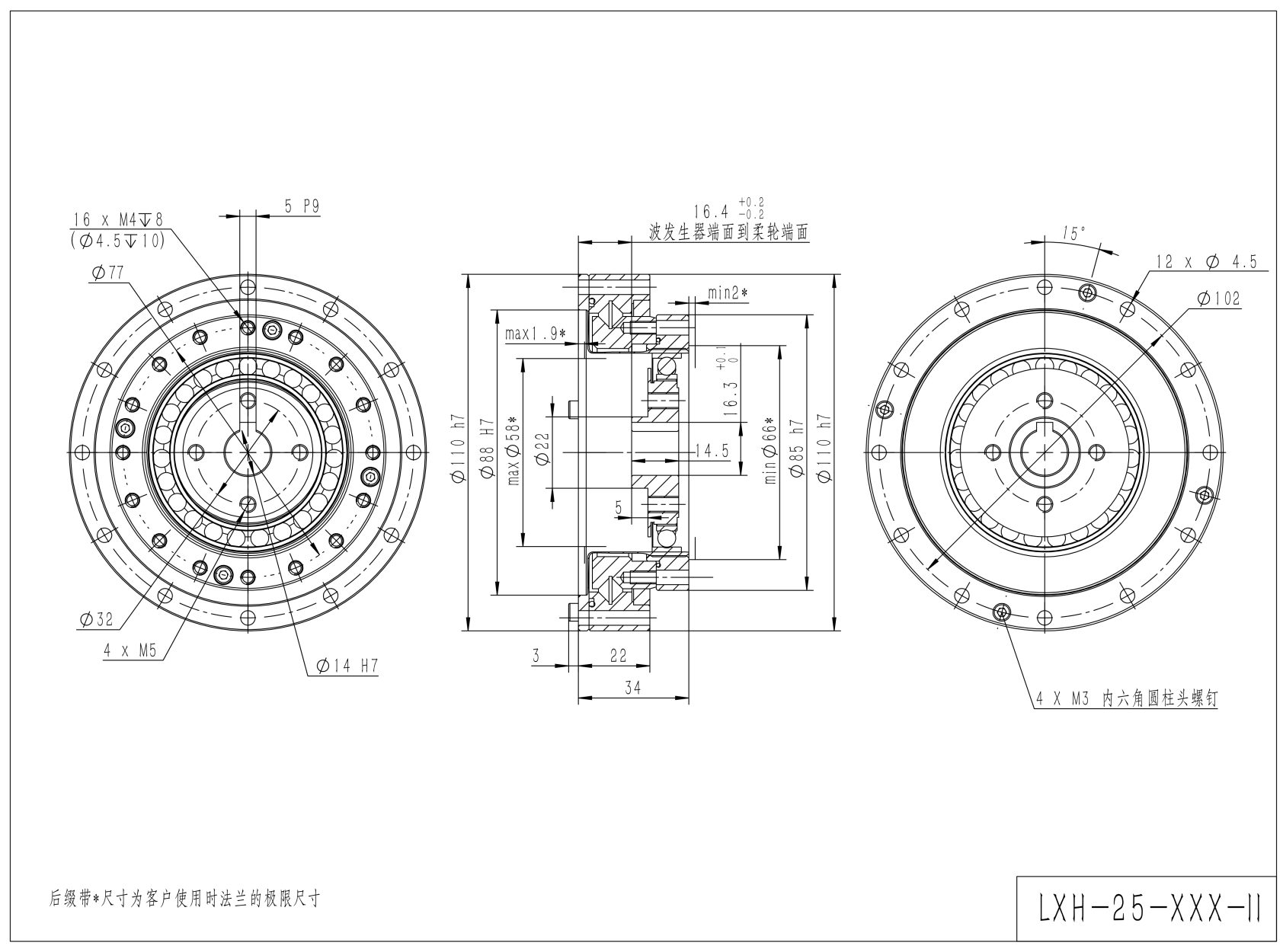
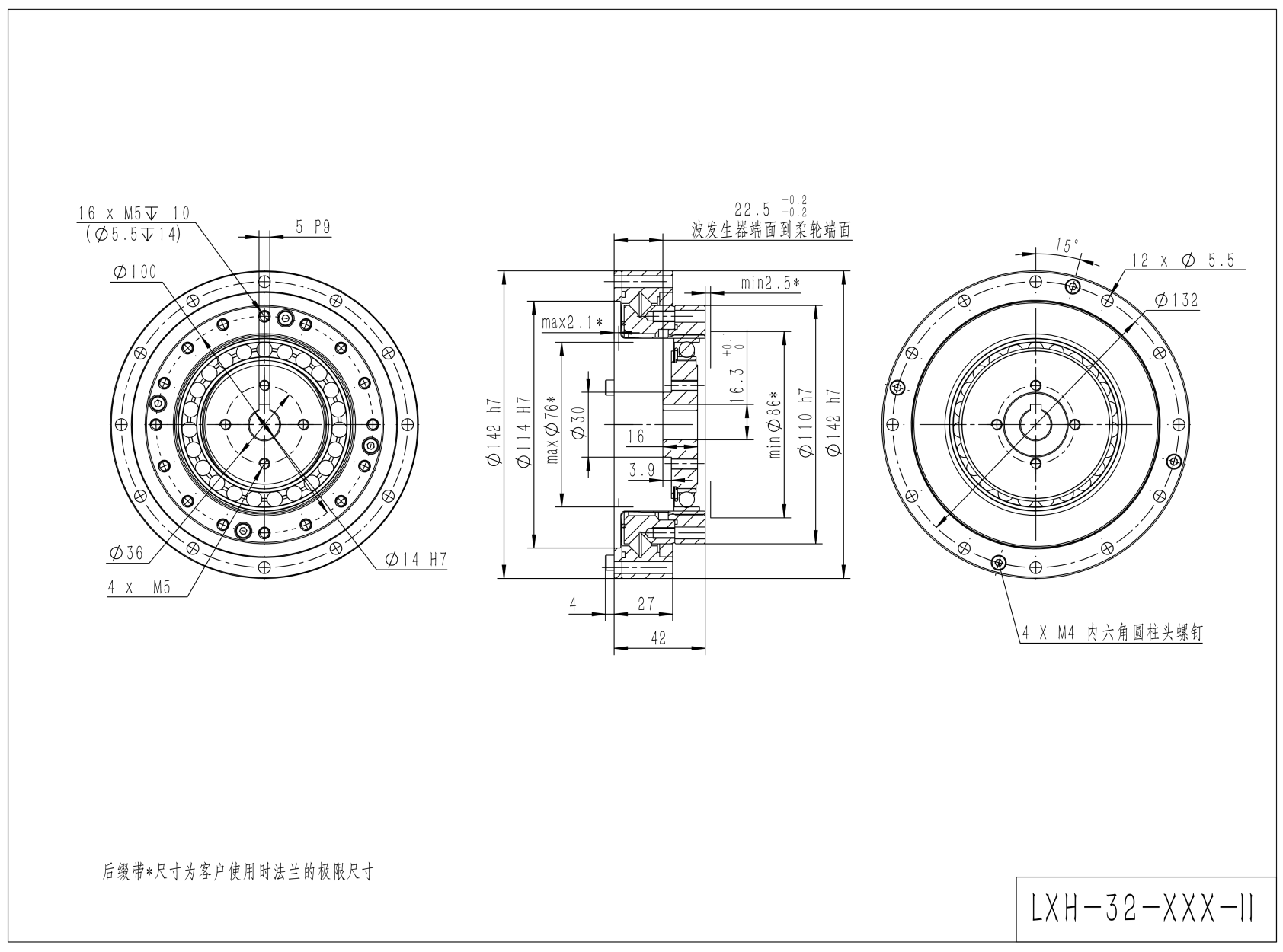
LXH- II 시리즈 감속기
LXH--II 시리즈 감속기는 분리된 웨이브 제너레이터와 감속기 본체를 가진 단순 조합형 감속기입니다. 고객은 웨이브 제너레이터를 축방향 및 반경방향으로 설계하고 고정해야 하며, 이후 전체 캐비티에 그리스를 추가해야 합니다. 설치 요구사항이 높지만 전체 구조를 더 컴팩트하게 만들 수 있습니다. 웨이브 제너레이터는 모터 샤프트에 직접 설치할 수 있으며, 일반적으로 엔드 드라이브 메커니즘에 사용됩니다.

|
LXH- XX - XXX -II 시리즈 성능 매개변수 표 |
|||||||||
|
모델 |
감속비 |
정격 토크 '*1' (Nm) |
시작 및 정지 시 최대 허용 토크 (Nm) |
최대 허용 평균 부하 토크 '*2' (Nm) |
순간 최대 허용 토크 '*3' (Nm) |
최대 허용 입력 속도 |
허용 평균 입력 속도 |
백래시 |
전송 오차 |
|
≤ |
≤ |
||||||||
|
14 |
50 |
7 |
23 |
9 |
46 |
8000 |
3500 |
10 |
60 |
|
80 |
10 |
30 |
14 |
51 |
10 |
60 |
|||
|
100 |
10 |
36 |
14 |
70 |
10 |
60 |
|||
|
17 |
50 |
21 |
44 |
34 |
91 |
7000 |
3500 |
10 |
60 |
|
80 |
29 |
56 |
35 |
113 |
10 |
60 |
|||
|
100 |
31 |
70 |
51 |
143 |
10 |
60 |
|||
|
20 |
50 |
33 |
73 |
44 |
127 |
6000 |
3500 |
10 |
60 |
|
80 |
44 |
96 |
61 |
165 |
10 |
60 |
|||
|
100 |
52 |
107 |
64 |
191 |
10 |
60 |
|||
|
120 |
52 |
113 |
64 |
191 |
10 |
60 |
|||
|
25 |
50 |
51 |
127 |
72 |
242 |
5500 |
3500 |
10 |
60 |
|
80 |
82 |
178 |
113 |
332 |
10 |
60 |
|||
|
100 |
87 |
204 |
140 |
369 |
10 |
60 |
|||
|
120 |
87 |
217 |
140 |
395 |
10 |
60 |
|||
|
32 |
50 |
99 |
281 |
140 |
497 |
4500 |
3500 |
10 |
60 |
|
80 |
153 |
395 |
217 |
738 |
10 |
60 |
|||
|
100 |
178 |
433 |
281 |
841 |
10 |
60 |
|||
|
120 |
178 |
459 |
281 |
892 |
10 |
60 |
|||
|
'*1 정격 속도가 2000 rpm일 때의 정격 토크 크기. |
|||||||||
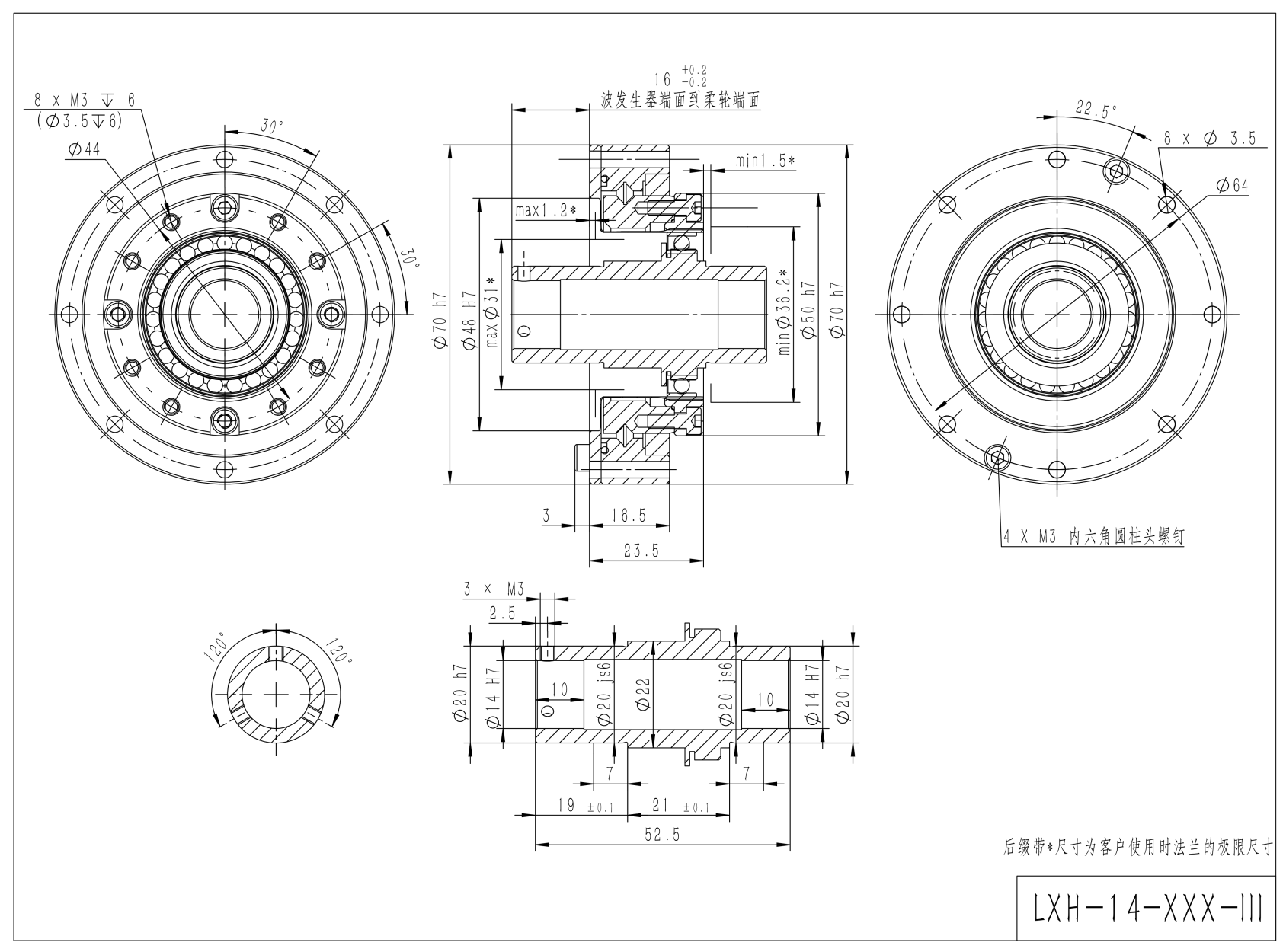
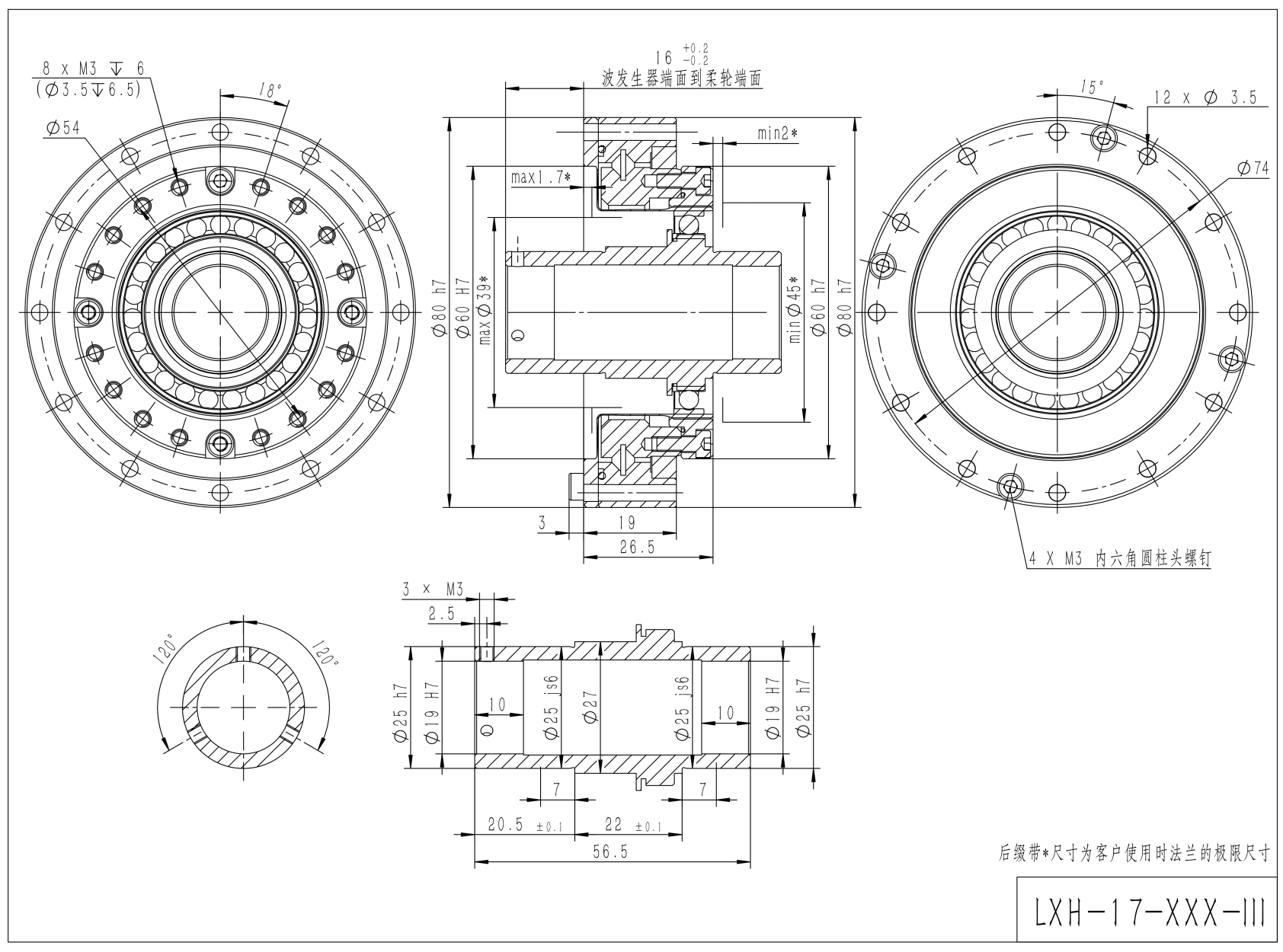
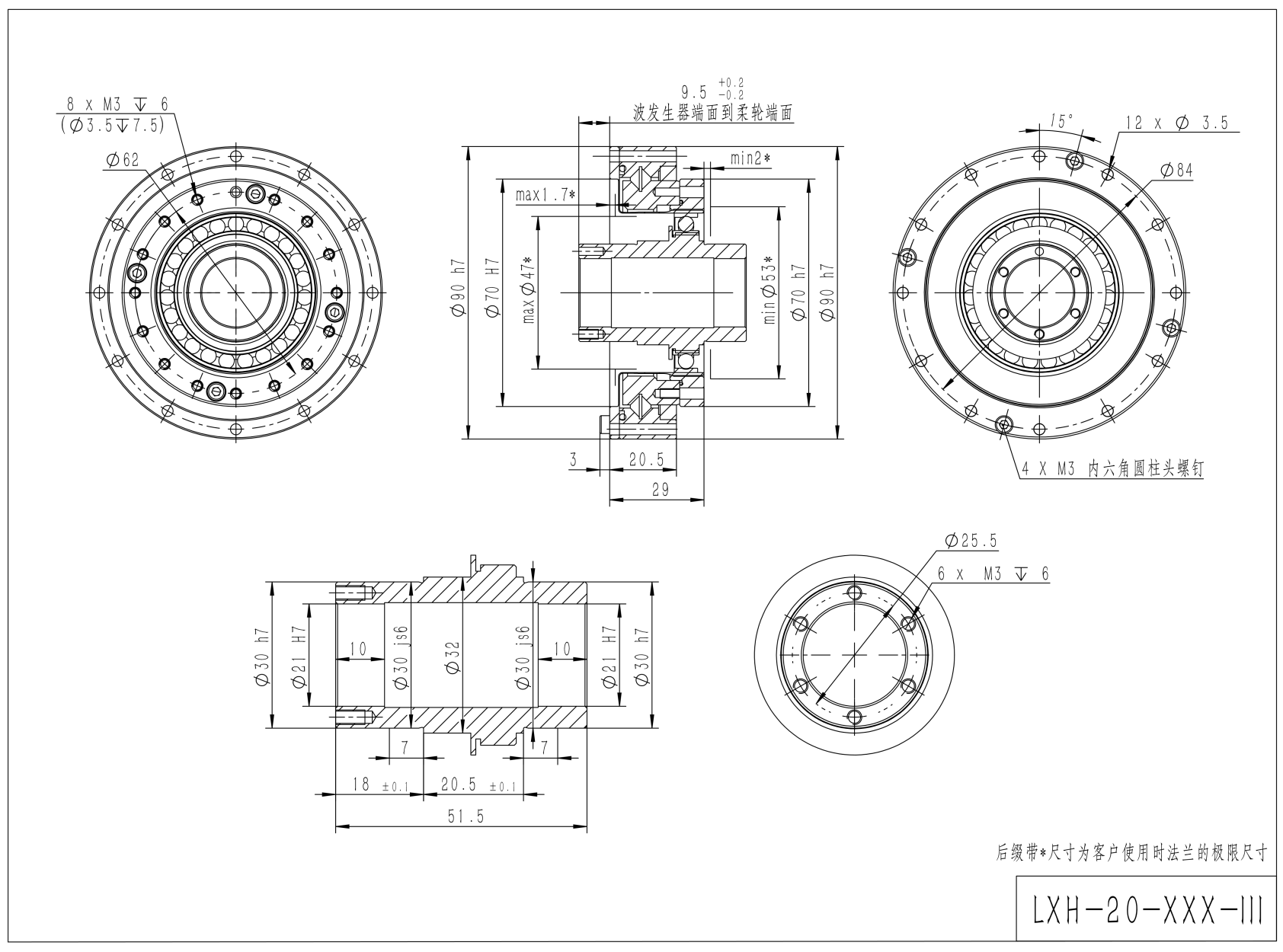
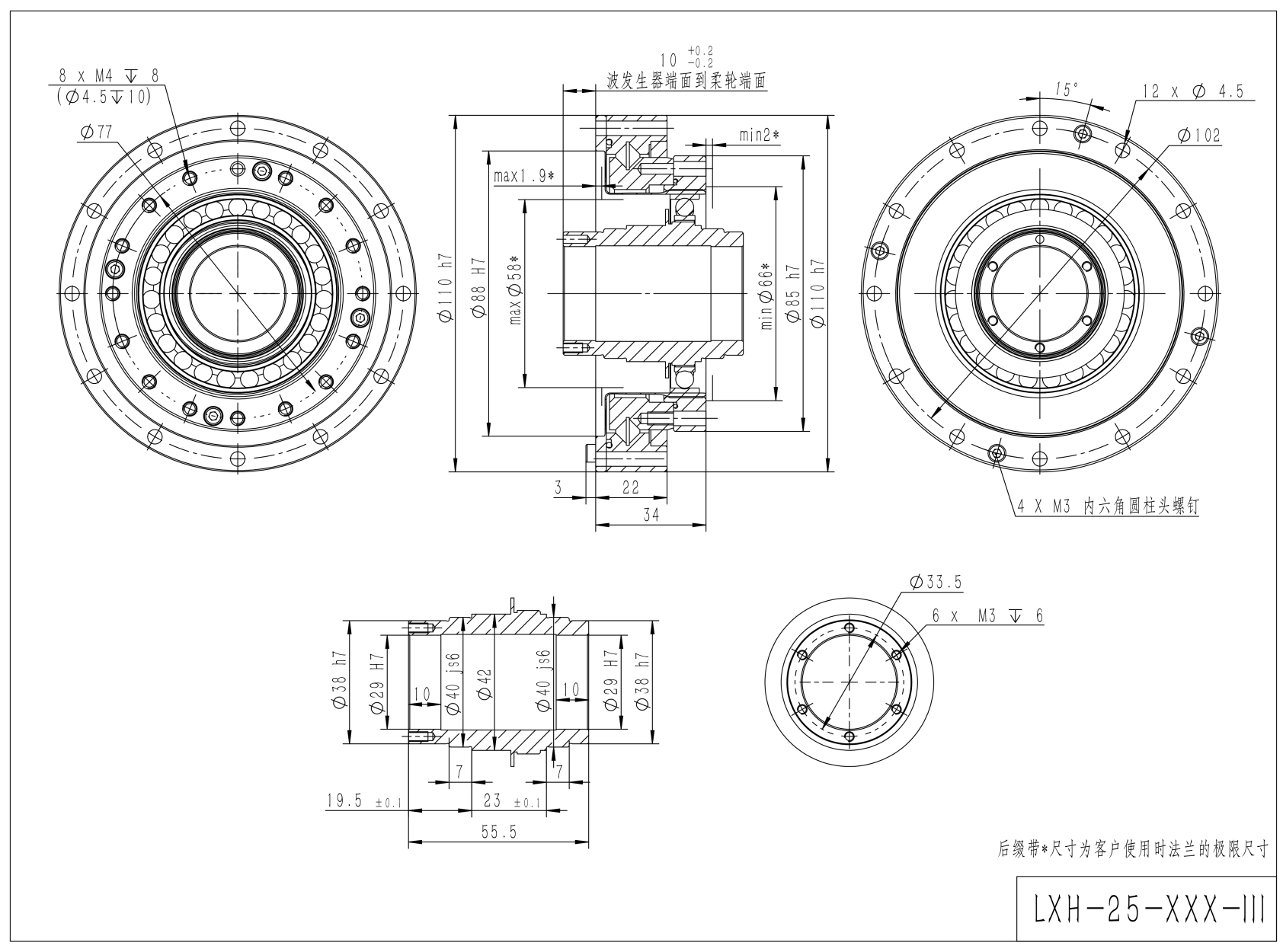
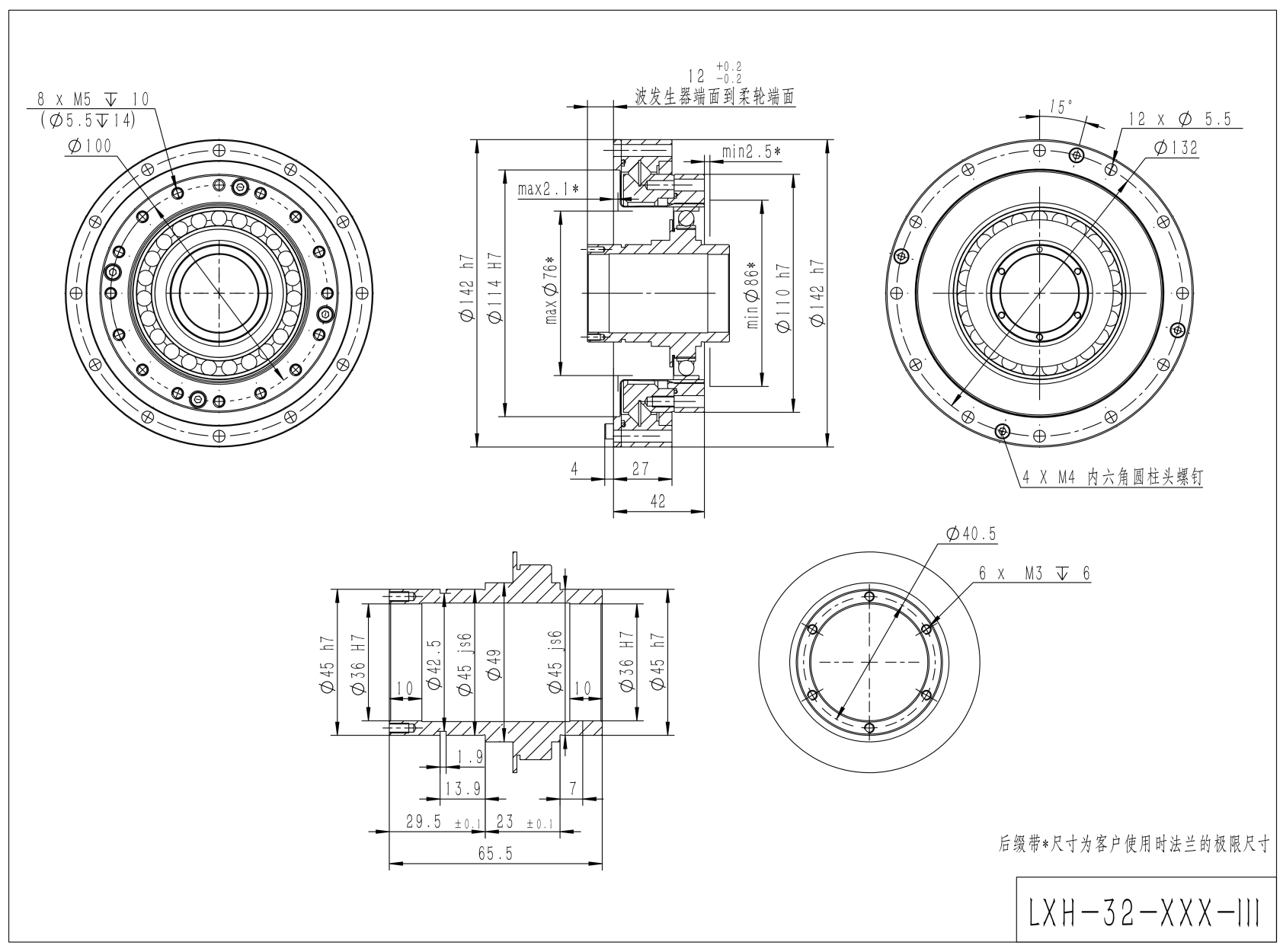
LXH-- III 시리즈 감속기
LXH-III 시리즈 감속기는 분리된 웨이브 제너레이터와 감속기 본체를 가진 단순 조합형 감속기입니다. 고객은 웨이브 제너레이터를 축방향 및 반경방향으로 설계하고 고정해야 하며, 이후 전체 캐비티에 그리스를 추가해야 합니다. 설치 요구사항이 높지만 전체 구조를 더 컴팩트하게 만들 수 있습니다. 웨이브 제너레이터는 중공형으로 중공 배선을 허용하며, 일반적으로 중간 드라이브 메커니즘에 사용됩니다.

|
LXH-III 시리즈 성능 파라미터 표 |
|||||||||
|
모델 |
감속비 |
정격 토크 '*1' (Nm) |
시작 및 정지 시 최대 허용 토크 (Nm) |
최대 허용 평균 부하 토크 '*2' (Nm) |
순간 최대 허용 토크 '*3' (Nm) |
최대 허용 입력 속도 |
허용 평균 입력 속도 |
백래시 |
전송 오차 |
|
≤ |
≤ |
||||||||
|
14 |
50 |
7 |
23 |
9 |
46 |
8000 |
3500 |
10 |
60 |
|
80 |
10 |
30 |
14 |
51 |
10 |
60 |
|||
|
100 |
10 |
36 |
14 |
70 |
10 |
60 |
|||
|
17 |
50 |
21 |
44 |
34 |
91 |
7000 |
3500 |
10 |
60 |
|
80 |
29 |
56 |
35 |
113 |
10 |
60 |
|||
|
100 |
31 |
70 |
51 |
143 |
10 |
60 |
|||
|
20 |
50 |
33 |
73 |
44 |
127 |
6000 |
3500 |
10 |
60 |
|
80 |
44 |
96 |
61 |
165 |
10 |
60 |
|||
|
100 |
52 |
107 |
64 |
191 |
10 |
60 |
|||
|
120 |
52 |
113 |
64 |
191 |
10 |
60 |
|||
|
25 |
50 |
51 |
127 |
72 |
242 |
5500 |
3500 |
10 |
60 |
|
80 |
82 |
178 |
113 |
332 |
10 |
60 |
|||
|
100 |
87 |
204 |
140 |
369 |
10 |
60 |
|||
|
120 |
87 |
217 |
140 |
395 |
10 |
60 |
|||
|
32 |
50 |
99 |
281 |
140 |
497 |
4500 |
3500 |
10 |
60 |
|
80 |
153 |
395 |
217 |
738 |
10 |
60 |
|||
|
100 |
178 |
433 |
281 |
841 |
10 |
60 |
|||
|
120 |
178 |
459 |
281 |
892 |
10 |
60 |
|||
|
'*1 정격 속도가 2000 rpm일 때의 정격 토크 크기. |
|||||||||
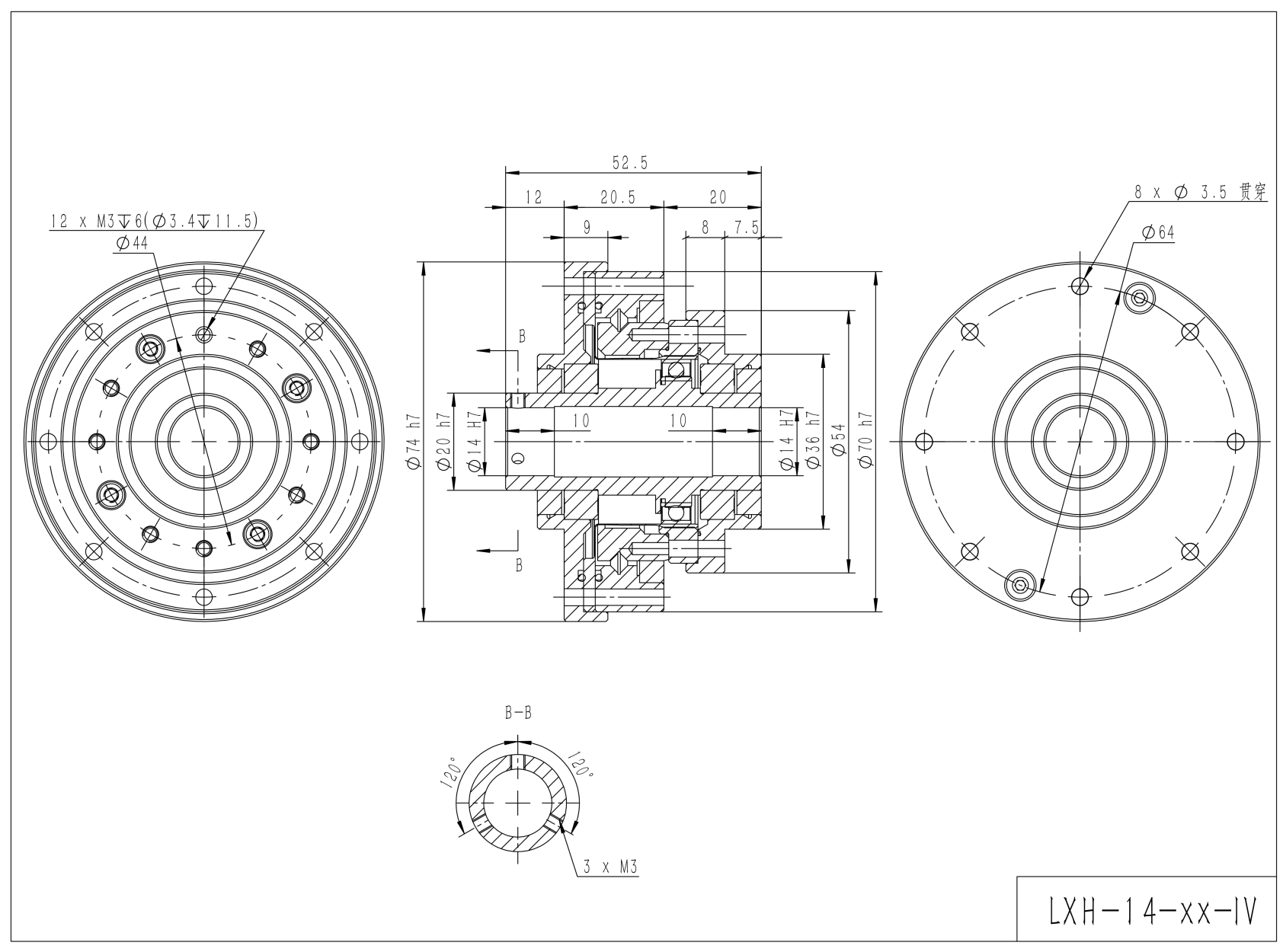
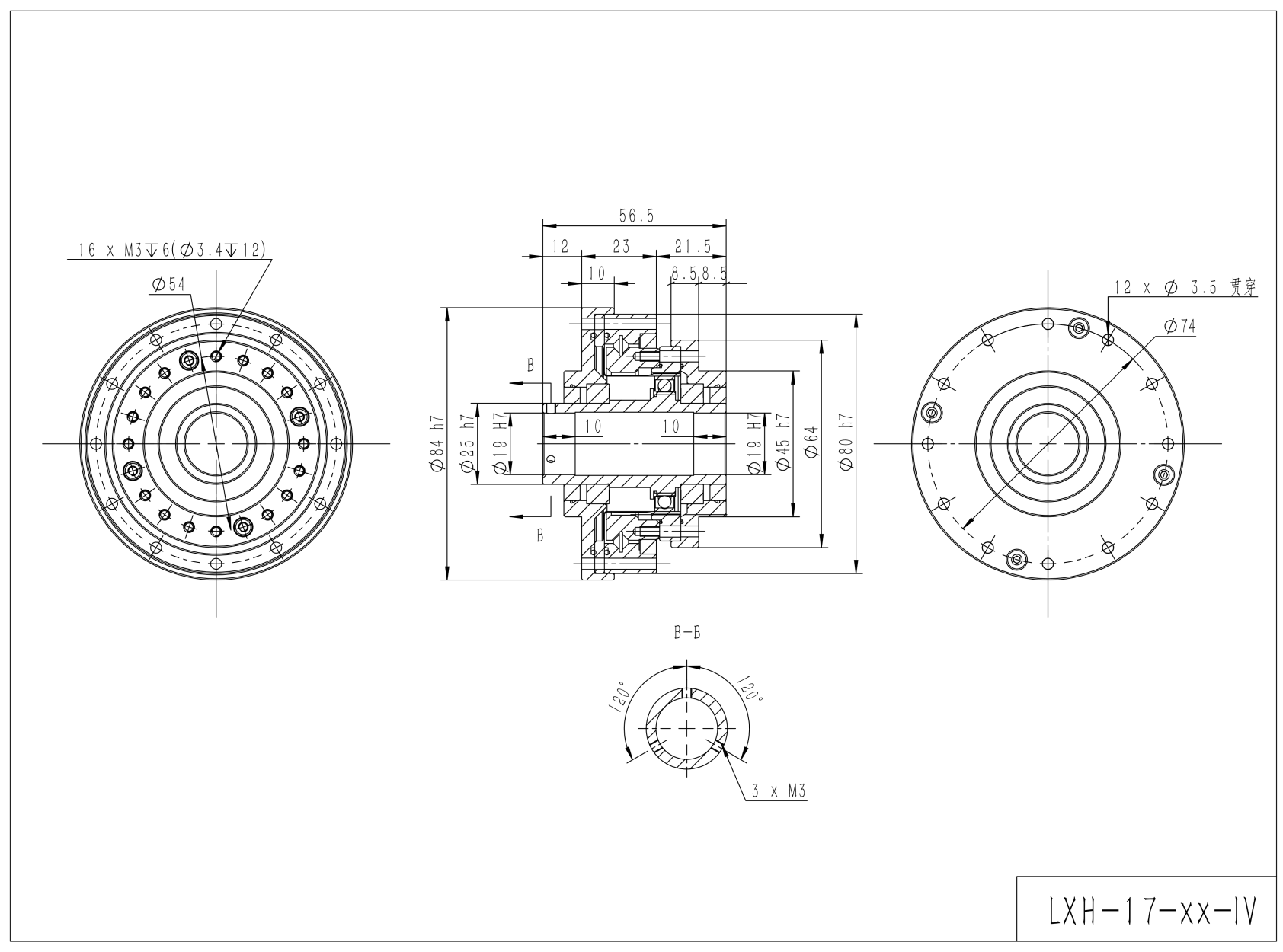
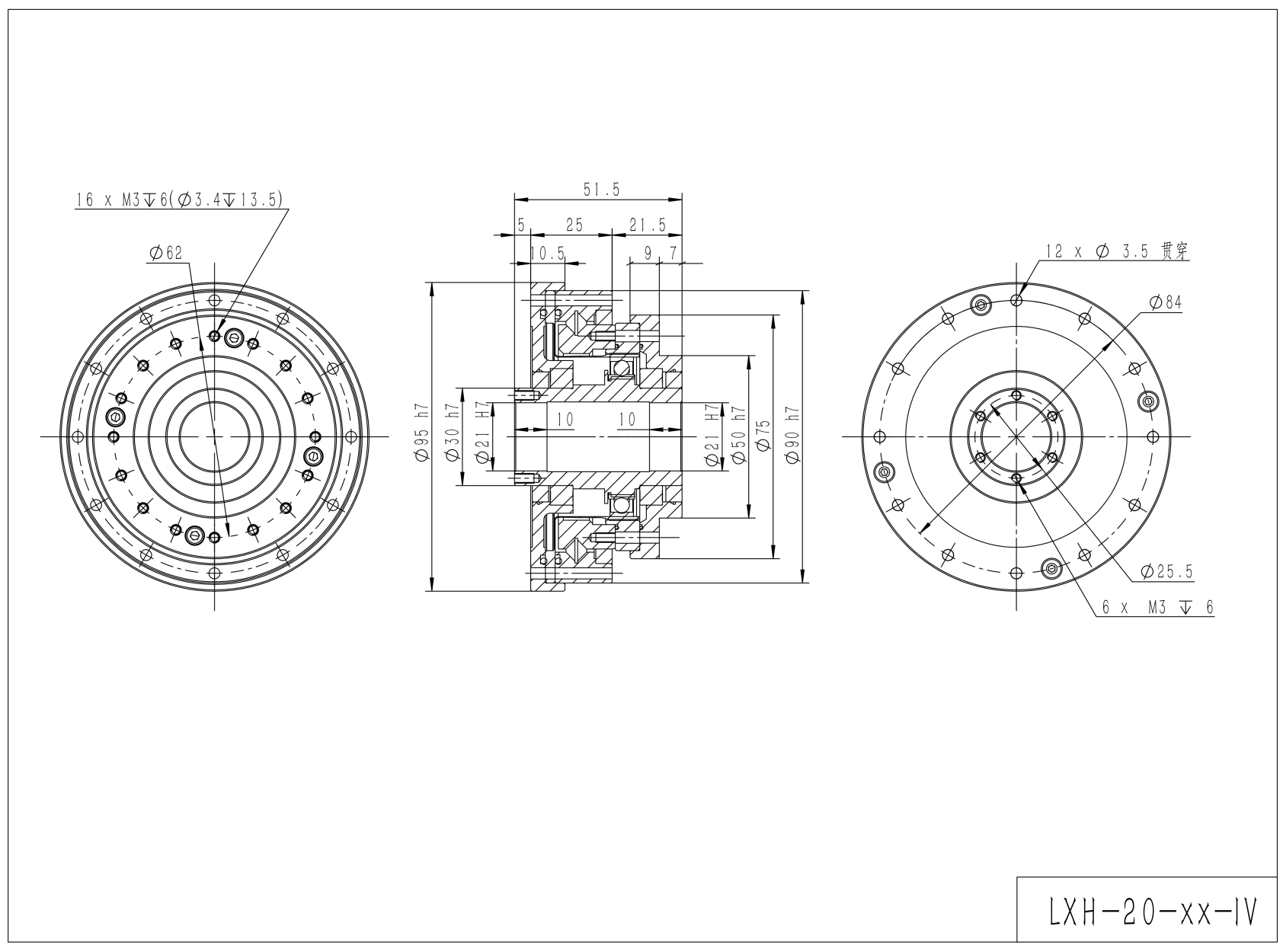
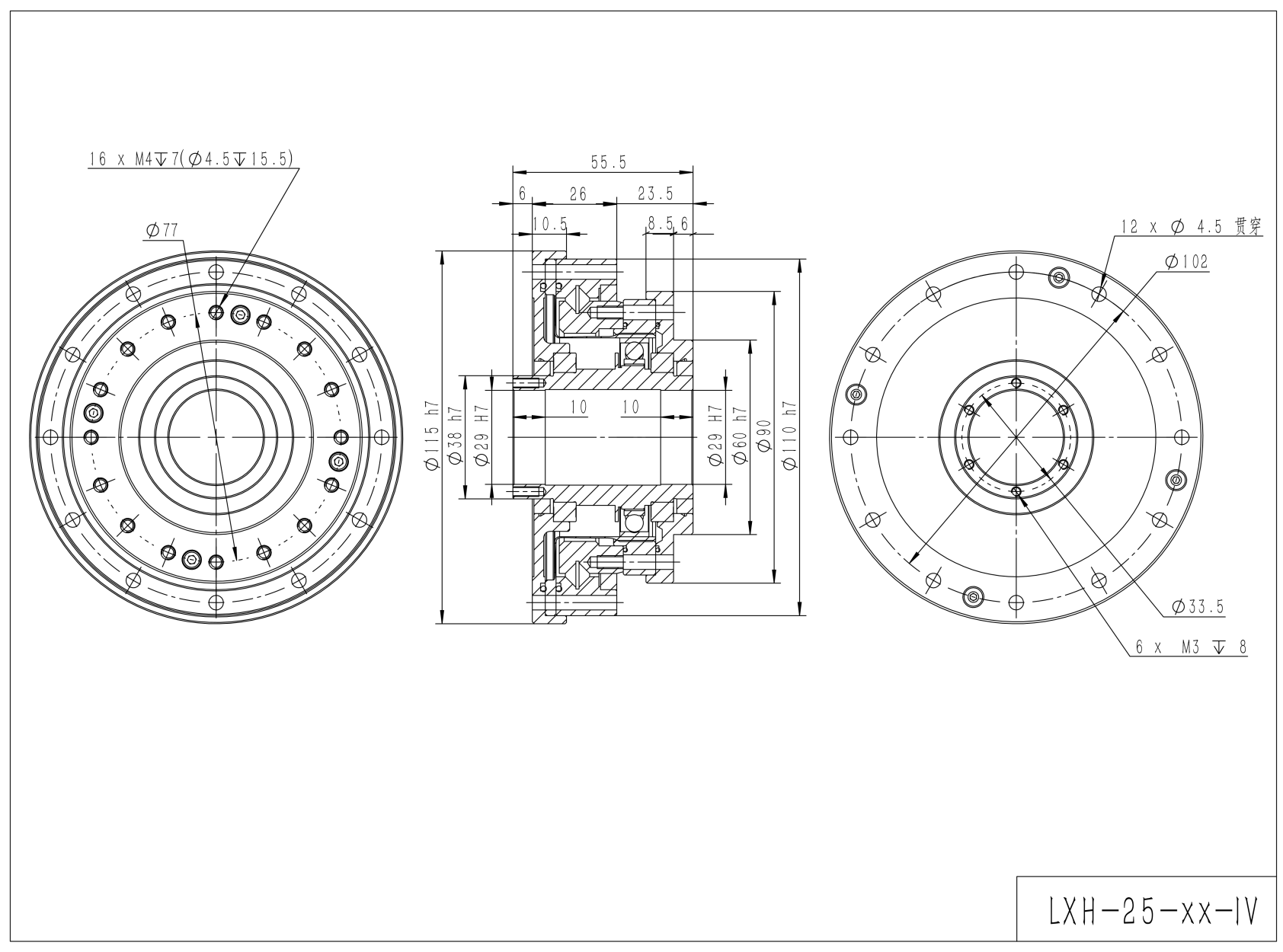
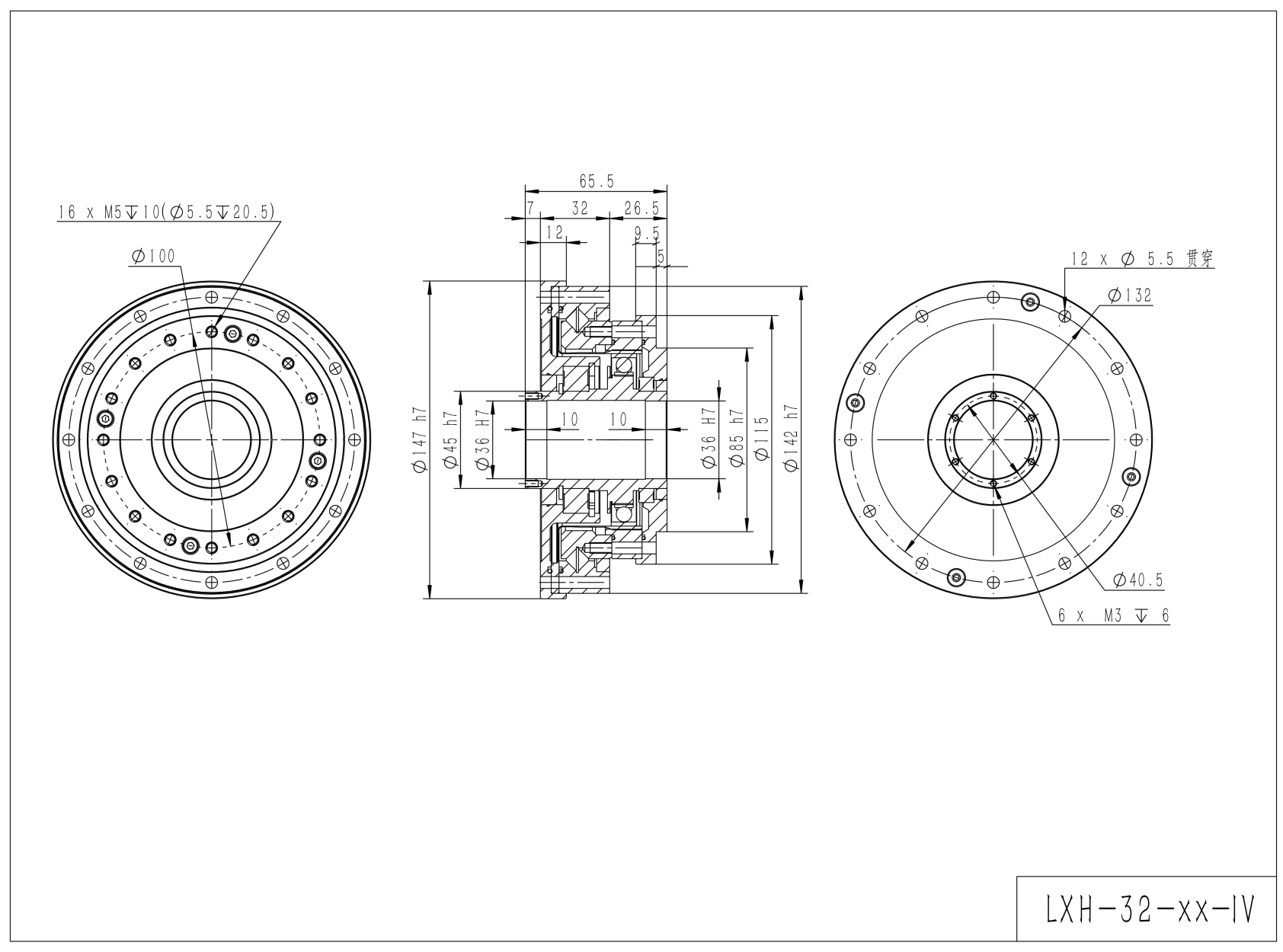
LXH-- IV 시리즈 감속기
LXH--IV 시리즈 감속기는 중공 입력 단자를 가진 조합형 감속기입니다. 그리스와 지지 베어링이 유닛에 통합되어 있어 고객의 설치가 더 쉽습니다. 중공 배선을 허용하며 일반적으로 중간 드라이브 메커니즘에 사용됩니다.

|
LXH-IV 시리즈 성능 파라미터 표 |
|||||||||
|
모델 |
감속비 |
정격 토크 '*1' (Nm) |
시작 및 정지 시 최대 허용 토크 (Nm) |
최대 허용 평균 부하 토크 '*2' (Nm) |
순간 최대 허용 토크 '*3' (Nm) |
최대 허용 입력 속도 |
허용 평균 입력 속도 |
백래시 |
전송 오차 |
|
≤ |
≤ |
||||||||
|
14 |
50 |
7 |
23 |
9 |
46 |
8000 |
3500 |
10 |
60 |
|
80 |
10 |
30 |
14 |
51 |
10 |
60 |
|||
|
100 |
10 |
36 |
14 |
70 |
10 |
60 |
|||
|
17 |
50 |
21 |
44 |
34 |
91 |
7000 |
3500 |
10 |
60 |
|
80 |
29 |
56 |
35 |
113 |
10 |
60 |
|||
|
100 |
31 |
70 |
51 |
143 |
10 |
60 |
|||
|
20 |
50 |
33 |
73 |
44 |
127 |
6000 |
3500 |
10 |
60 |
|
80 |
44 |
96 |
61 |
165 |
10 |
60 |
|||
|
100 |
52 |
107 |
64 |
191 |
10 |
60 |
|||
|
120 |
52 |
113 |
64 |
191 |
10 |
60 |
|||
|
25 |
50 |
51 |
127 |
72 |
242 |
5500 |
3500 |
10 |
60 |
|
80 |
82 |
178 |
113 |
332 |
10 |
60 |
|||
|
100 |
87 |
204 |
140 |
369 |
10 |
60 |
|||
|
120 |
87 |
217 |
140 |
395 |
10 |
60 |
|||
|
32 |
50 |
99 |
281 |
140 |
497 |
4500 |
3500 |
10 |
60 |
|
80 |
153 |
395 |
217 |
738 |
10 |
60 |
|||
|
100 |
178 |
433 |
281 |
841 |
10 |
60 |
|||
|
120 |
178 |
459 |
281 |
892 |
10 |
60 |
|||
|
'*1 정격 속도가 2000 rpm일 때의 정격 토크 크기. |
|||||||||
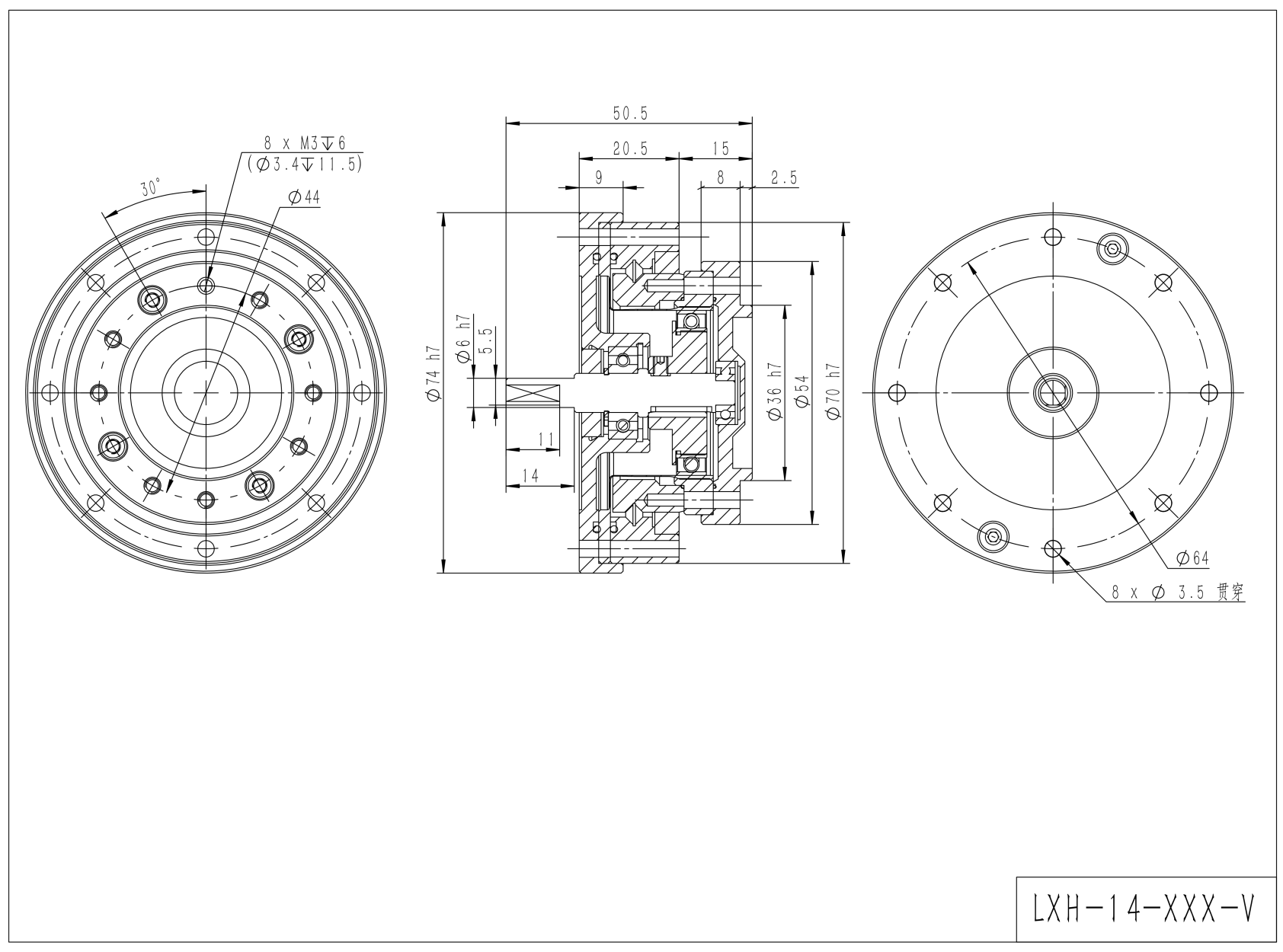
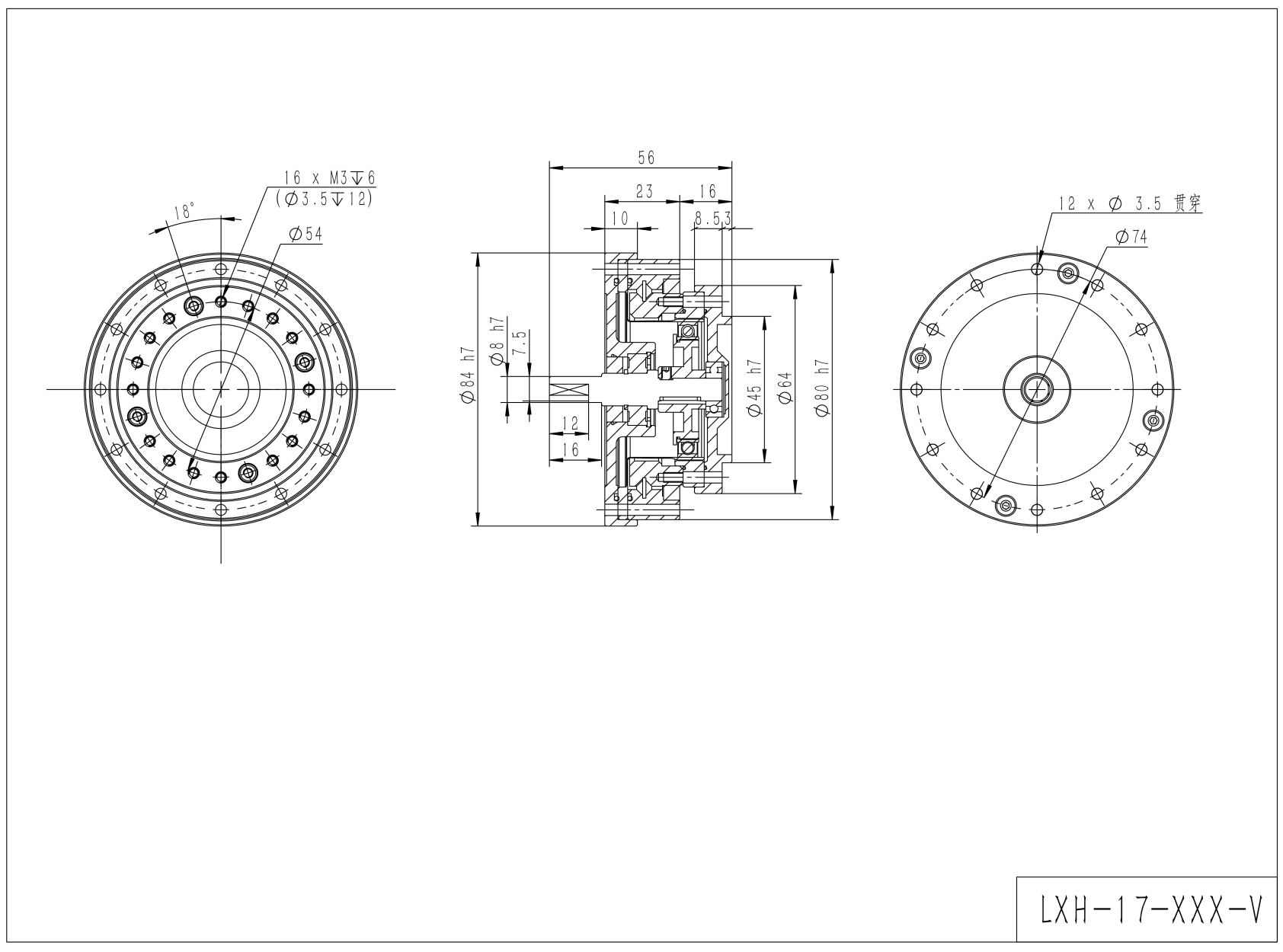
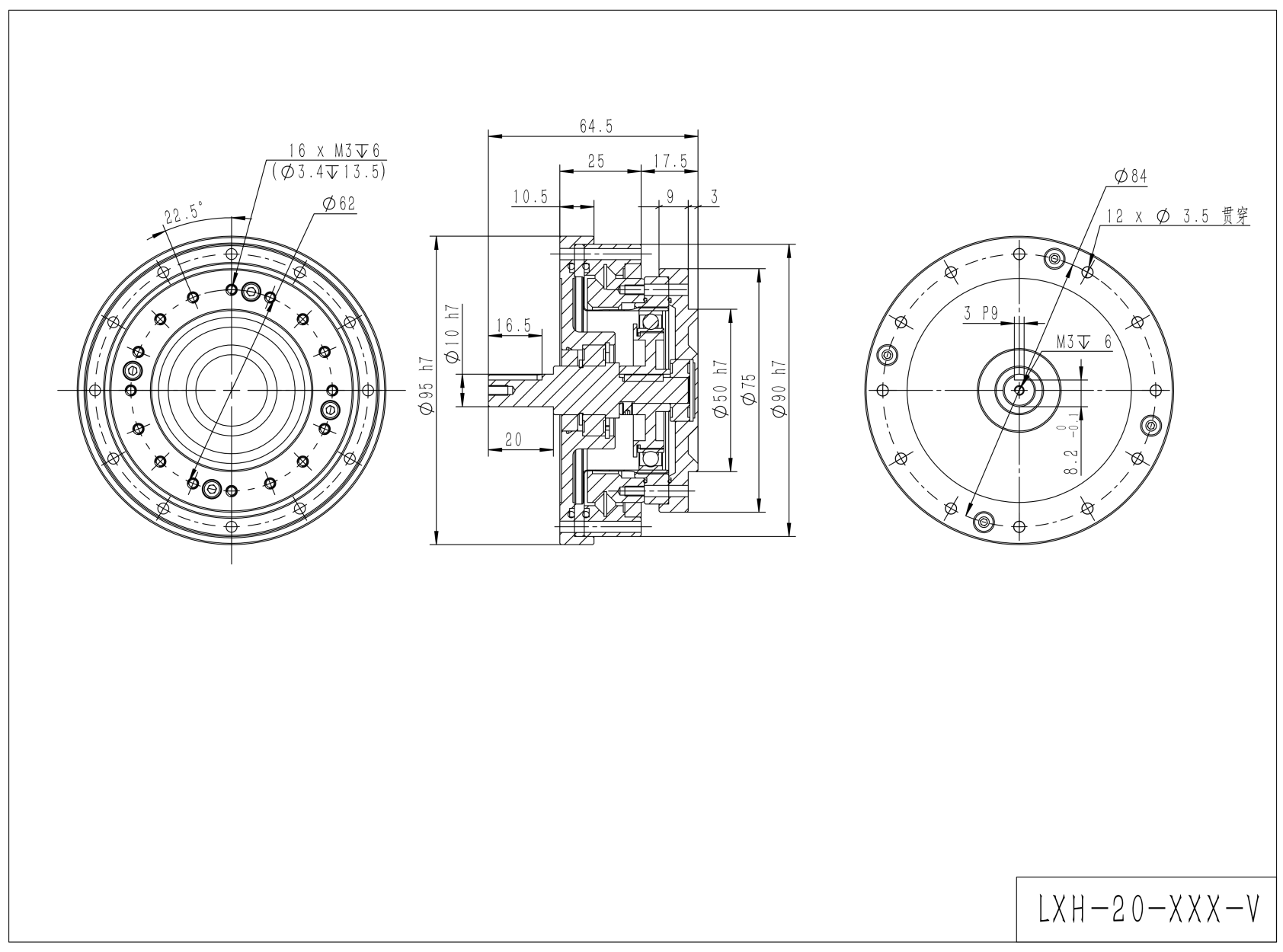
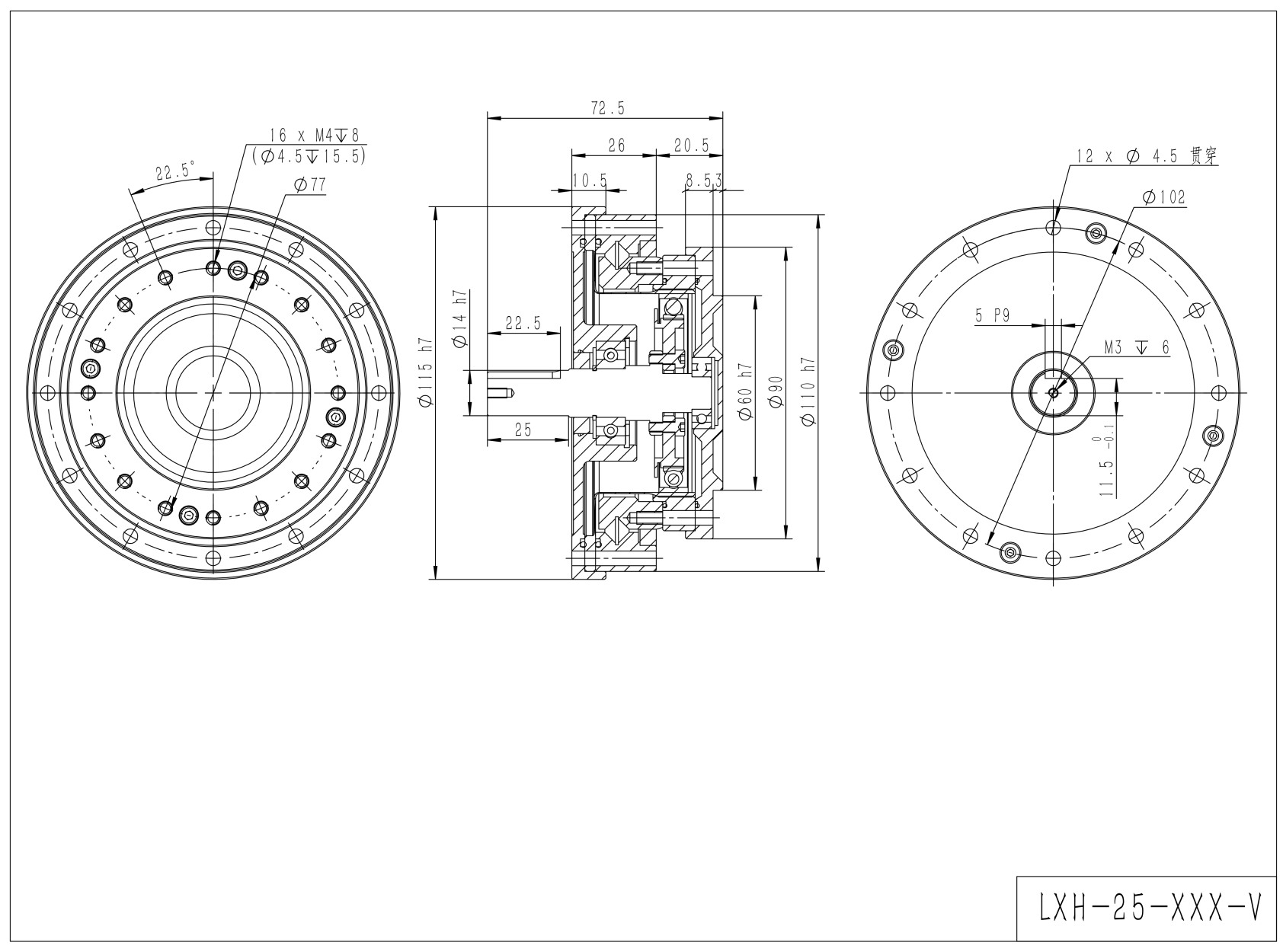
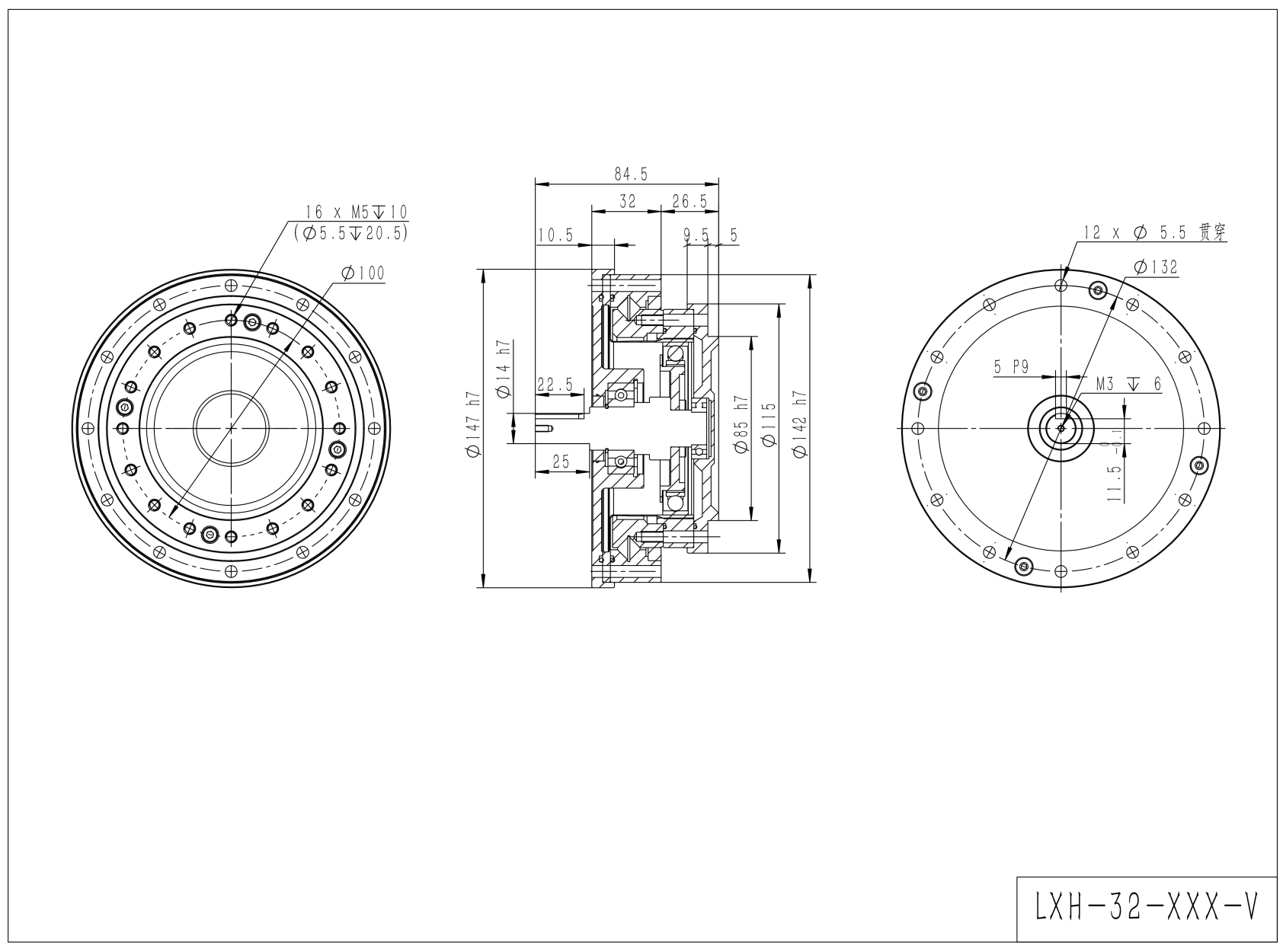
LXH-- V 시리즈 감속기
LXH --V 시리즈 감속기는 원형 샤프트 입력 단자를 가진 조합형 감속기입니다. 그리스와 지지 베어링이 유닛에 통합되어 있어 고객의 설치가 더 쉽습니다. 중공 배선을 허용하지 않으며 일반적으로 엔드 메커니즘에 사용됩니다.


|
LXH-V 시리즈 성능 파라미터 표 |
|||||||||
|
모델 |
감속비 |
정격 토크 '*1' (Nm) |
시작 및 정지 시 최대 허용 토크 (Nm) |
최대 허용 평균 부하 토크 '*2' (Nm) |
순간 최대 허용 토크 '*3' (Nm) |
최대 허용 입력 속도 |
허용 평균 입력 속도 |
백래시 |
전송 오차 |
|
≤ |
≤ |
||||||||
|
14 |
50 |
7 |
23 |
9 |
46 |
8000 |
3500 |
10 |
60 |
|
80 |
10 |
30 |
14 |
51 |
10 |
60 |
|||
|
100 |
10 |
36 |
14 |
70 |
10 |
60 |
|||
|
17 |
50 |
21 |
44 |
34 |
91 |
7000 |
3500 |
10 |
60 |
|
80 |
29 |
56 |
35 |
113 |
10 |
60 |
|||
|
100 |
31 |
70 |
51 |
143 |
10 |
60 |
|||
|
20 |
50 |
33 |
73 |
44 |
127 |
6000 |
3500 |
10 |
60 |
|
80 |
44 |
96 |
61 |
165 |
10 |
60 |
|||
|
100 |
52 |
107 |
64 |
191 |
10 |
60 |
|||
|
120 |
52 |
113 |
64 |
191 |
10 |
60 |
|||
|
25 |
50 |
51 |
127 |
72 |
242 |
5500 |
3500 |
10 |
60 |
|
80 |
82 |
178 |
113 |
332 |
10 |
60 |
|||
|
100 |
87 |
204 |
140 |
369 |
10 |
60 |
|||
|
120 |
87 |
217 |
140 |
395 |
10 |
60 |
|||
|
32 |
50 |
99 |
281 |
140 |
497 |
4500 |
3500 |
10 |
60 |
|
80 |
153 |
395 |
217 |
738 |
10 |
60 |
|||
|
100 |
178 |
433 |
281 |
841 |
10 |
60 |
|||
|
120 |
178 |
459 |
281 |
892 |
10 |
60 |
|||
|
'*1 정격 속도가 2000 rpm일 때의 정격 토크 크기. |
|||||||||
하모닉 감속기
공유하기:





제품 카테고리:
제품 상담
연락처 정보를 제출해 주시면 가능한 한 빨리 연락드리겠습니다!





주소: 중국 저장성 동양시 헝디안진 산업대로 196호
Linix 모터 남중국 사무소
주소: 중국 광동성 동관시 톈샤로 2번지 아오싱 과학기술 공원 1003호

전화:
E-mail:
在线客服添加返回顶部
页面顺滑的滚动
启用全局默认滚动动画 (向上滚动)
右侧在线客服样式 1,2,3 2
图片alt标题设置: Linix 모터
CSS / JS 文件放置地